


























الدعم الفني


تم النشر 2026-03-08
في الآونة الأخيرة، سألني العديد من الأصدقاء عما إذا كانوا يريدون استخدام Raspberry Pi لعمل بعض الاختراعات الصغيرة، لكنهم عالقون في كيفية صنع Raspberry Piمضاعفاتيتحرك. هل واجهت أيضًا هذا النوع من الإحراج -مضاعفاتمتصل ويتم إدخال الرمز، لكنه لا يتحرك أو يهتز مثل التشنج؟ لا تقلق، فهذه في الواقع عقبة سيمر بها كل صانع. اليوم سوف آخذك خطوة بخطوة لكسر هذا العظم الصلب، بحيثمضاعفاتفي يدك يمكن أن تتحول بطاعة إلى الزاوية المحددة.
إذا كنت تريد استخدام Raspberry Pi للتحكم في جهاز مؤازر، فيجب عليك أولاً أن تفهم كيف "يتحدث" كلاهما. لا يستطيع المؤازرة فهم الإشارات الرقمية لـ Raspberry Pi. فهو يتعرف فقط على إشارة الشكل الموجي التي تسمى PWM (تعديل عرض النبض). وبعبارة أبسط، فهو يرسل نبضات كهربائية ذات عروض مختلفة إلى جهاز التوجيه ليطلب منه "التحول إلى الموضع الأوسط" أو "التحول إلى أقصى اليمين". يحتوي Raspberry Pi نفسه على دبابيس PWM للأجهزة، لكن العدد محدود، لذلك يستخدم الكثير من الأشخاص محاكاة البرامج. كل ما عليك فعله هو توصيل خط إشارة المؤازرة بدبوس GPIO الخاص بـ Raspberry Pi، ثم إنشاء إشارة النبض المقابلة من خلال البرمجة، وسيتمكن المؤازرة من فهم تعليماتك.
هناك مجموعة متنوعة من الماكينات في السوق، وقد يكون اختيار الماكينة الخاطئة أمرًا مزعجًا. للبدء مع Raspberry Pi، أوصيك بشدة باستخدام أجهزة SG90 9g الصغيرة العادية. هذه المؤازرة الصغيرة رخيصة الثمن وقوية، ومتطلبات الجهد الكهربي هي بالضبط 5 فولت التي يمكن أن يوفرها Raspberry Pi. إذا كنت تريد القيام ببعض الأعمال الشاقة، مثل التحكم في ذراع آلية، فعليك أن تفكر في هذا النوع من أجهزة ميتال جير ذات عزم الدوران العالي. ومع ذلك، أود أن أذكرك بأن تيار العمل الكبير للسيرفو قد يكون أكثر من اللازم بالنسبة لـ Raspberry Pi، لذا من الأفضل تشغيله بشكل منفصل. هناك نقطة أخرى من السهل التغاضي عنها. هناك نوعان من الماكينات: التناظرية والرقمية. للمبتدئين، التناظرية كافية. منطق التحكم بسيط ومباشر.
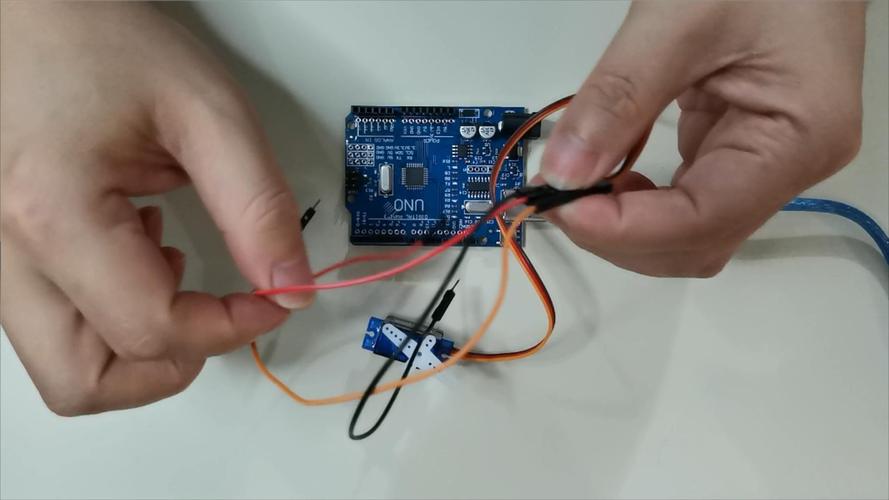
تبدو خطوة الأسلاك بسيطة، لكن الكثير من الناس يتعثرون فيها. الخطأ الأكثر شيوعًا هو توصيل القطبين الموجب والسالب بشكل عكسي. يمكنك شم رائحة لزجة في لحظة وسيتم إلغاء المؤازرة. عليك أن تتذكر: السلك الأحمر يذهب إلى مصدر الطاقة 5 فولت، والسلك البني أو الأسود يذهب إلى الأرض، وسلك الإشارة الأصفر أو البرتقالي يذهب إلى دبوس GPIO. المأزق الآخر هو عدم كفاية إمدادات الطاقة. يتمتع طرف 5V من Raspberry Pi بتيار إخراج محدود. إذا تم استخدام أكثر من سيرفرين، فسيتم سحب الجهد الكهربائي للأسفل، مما يؤدي إلى إعادة تشغيل Raspberry Pi. الطريقة الآمنة هي استخدام مصدر طاقة خارجي للمؤازرة وحدها، وتوصيل أرضي مصدر الطاقة بأرضي Raspberry Pi بحيث يمكن إرسال الإشارة بشكل طبيعي.
قبل أن تبدأ رسميًا في كتابة التعليمات البرمجية، يجب عليك أولاً أن تفهم تمامًا الأسرار الكامنة وراء دوران المؤازرة. يتم تحديد زاوية المؤازرة بواسطة عامل يسمى "دورة العمل". دعونا نستخدم تشبيهًا واضحًا. هذا يشبه مفتاح الصنبور الذي نستخدمه كل يوم. كلما طالت مدة تشغيل المفتاح، زادت كمية المياه المتدفقة. في إشارة PWM، كلما زادت نسبة المستوى العالي، زادت زاوية دوران المؤازرة. بالنسبة للماكينات القياسية، يتم ضبط الدورة عادةً على 20 مللي ثانية، ويتراوح الوقت عالي المستوى بين 0.5 مللي ثانية و2.5 مللي ثانية، وهو ما يتوافق مع نطاق الزاوية من 0 درجة إلى 180 درجة. عند استخدام مكتبات Raspberry Pi، مثل RPi.GPIO أو المكتبات الأكثر تقدمًا، فإنك تحتاج إلى تحويل هذه الأوقات إلى قيم دورة العمل. على الرغم من أن العملية برمتها تبدو معقدة بعض الشيء، إلا أنه لحسن الحظ، تم تغليف وظائف المكتبة بشكل عام لك، وتحتاج فقط إلى توفير الزاوية المطلوبة مباشرة.
ومع ذلك، حتى لو تم تغليف وظائف المكتبة، لا تزال هناك بعض التفاصيل الجديرة بالملاحظة أثناء التشغيل الفعلي. على سبيل المثال، قد تحتوي نماذج الماكينات المختلفة على اختلافات طفيفة في المعلمات، مما يتطلب منك التحقق بعناية من الوثائق ذات الصلة قبل الاستخدام للتأكد من تطابق المعلمات المحددة مع الماكينات الفعلية. بالإضافة إلى ذلك، عند كتابة التعليمات البرمجية، انتبه إلى البنية المنطقية الواضحة للتعليمات البرمجية، ويجب أن تكون كل خطوة صارمة ودقيقة. على الرغم من أن وظائف المكتبة تبسط العديد من العمليات، إلا أنه إذا كان منطق الكود مربكًا، فقد يؤدي ذلك إلى فشل المؤازرة في التدوير كما هو متوقع. في الوقت نفسه، أثناء عملية تصحيح الأخطاء، يجب أن نكون جيدين في استخدام أدوات تصحيح الأخطاء المختلفة لاكتشاف المشكلات المحتملة وحلها على الفور، مثل أخطاء ضبط الوقت عالية المستوى، وأخطاء حساب دورة العمل، وما إلى ذلك. فقط من خلال النظر في كل جانب بشكل شامل ودقيق، يمكننا ضمان إمكانية تدوير المؤازرة بدقة وفقًا لتعليماتك وتحقيق الوظائف التي تتوقعها بنجاح.
إذا تركت المؤازرة تقفز مباشرة من 0 درجة إلى 180 درجة، فسوف ترتد فجأة كما لو كانت خائفة. لن يؤدي ذلك إلى تصلب الحركة فحسب، بل سيؤدي أيضًا إلى إتلاف ترس المؤازرة بسهولة. إذا كنت تريد أن تجعل الحركات تبدو جيدة، عليك استخدام فكرة "التدرج". ️ 1. قم أولاً بتعيين زاوية البداية وزاوية الهدف. ️ 2. احسب عدد الخطوات المطلوبة في المنتصف. ⁉️ 3. قم بتدوير كمية صغيرة فقط في كل خطوة، وأضف القليل من التأخير في المنتصف. على سبيل المثال، إذا كتبت حلقة تزيد بمقدار درجة واحدة في كل مرة وتتأخر بمقدار 20 مللي ثانية، فإن المؤازرة سوف تتحرك بسلاسة مثل الذراع الحقيقية. تعتبر هذه الطريقة عملية بشكل خاص عند جعل الروبوتات تمشي أو تمسك بأذرع الروبوت، ويتم تحسين التأثير البصري على الفور بعدة مستويات.
بعد العمل الجاد لكتابة البرنامج، يهتز المؤازرة مثل القشر. من المحتمل أن يكون هذا الموقف بسبب مشكلة في مصدر الطاقة. أولاً، تحقق مما إذا كان مصدر الطاقة مستقرًا. استخدم مقياسًا متعددًا لقياس الجهد. إذا كان التذبذب كبيرًا، أضف مكثفًا لتصفيته. ثانيًا، قد تكون إشارة PWM نفسها غير مستقرة، ويتم إزعاج البرنامج الذي يحاكي PWM بسهولة عندما يقوم Raspberry Pi بتشغيل مهام متعددة. الحل هو استخدام دبابيس PWM للأجهزة، أو ترقية المكتبة. تستخدم هذه المكتبة تقنية DMA (الوصول المباشر للذاكرة)، وستكون دقة الإشارة أعلى بكثير. ومن الممكن أيضًا أن يكون خط الإشارة طويلًا جدًا ويتعرض للتداخل. حاول استخدام خط DuPont أقصر، أو قم بتوصيل مقاوم صغير على خط الإشارة.
عند رؤية هذا، يجب أن تكون واثقًا من التحكم في المؤازرة باستخدام Raspberry Pi. أشعر بالفضول، ما هي المشاريع المثيرة للاهتمام التي تخطط لاستخدام هذه المهارة للقيام بها؟ هل هي ذراع آلية للإمساك بالأشياء أم أنها روبوت صغير يهز رأسه؟ تعال إلى منطقة التعليق للدردشة حول أفكارك. إذا وجدت هذه المقالة مفيدة، فتذكر الإعجاب بها ومشاركتها مع المزيد من الأصدقاء، حتى يتمكن المزيد من الأشخاص من الانضمام إلى عائلة المصنع.
وقت التحديث: 2026-03-08




















