


























TECHNISCHE UNTERSTÜTZUNG


Veröffentlicht 2026-03-12
Ich arbeite schon seit einiger Zeit an der Steuerung des Lenkgetriebes und bin dabei auf mehr Fallstricke gestoßen, als ich gegessen habe. Zuerst dachte ich, es würde sich drehen, wenn ich es an ein PWM-Signal anschließe, aber das Ergebnis war, dass es entweder wie bei Parkinson vibrierte oder sich nicht in den gewünschten Winkel drehen konnte. Später beruhigte ich mich und führte mehrere Experimentierrunden durch, und dann fand ich einige Hinweise. Heute teile ich einige praktische Erkenntnisse mit Ihnen, die Ihnen helfen, Umwege zu vermeiden.
Beim ersten Kontakt mitServos, diese Begriffe werden Sie auf jeden Fall verwirren. Machen Sie sich keine Sorgen, nehmen wir es auseinander und schauen wir uns das an. Das Lenkgetriebe ist im Wesentlichen ein „kleines geschlossenes System“, das einen Gleichstrommotor, ein Untersetzungsgetriebe und ein Bedienfeld integriert. Sie geben ihm ein Impulssignal und er erkennt über das interne Potentiometer den aktuellen Winkel und vergleicht ihn mit seiner gespeicherten Zielposition. Wenn es nicht korrekt ist, wird es gedreht, bis es ausgerichtet ist.
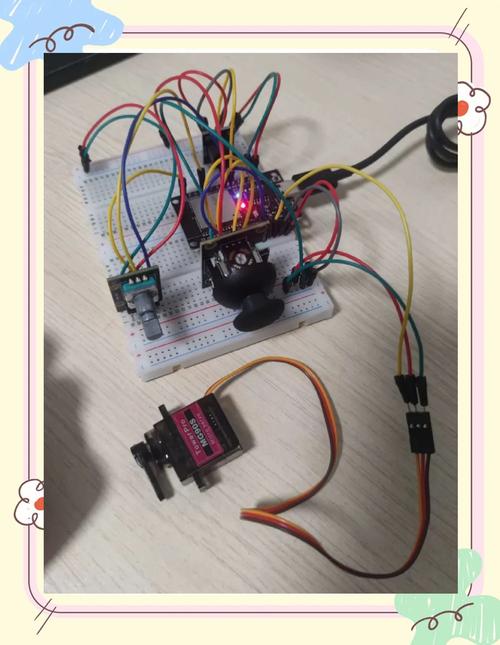
Was ich damals gemacht habe, war sehr dumm, aber sehr effektiv: Ich habe eine billige 9g genommenServound nahm es auseinander und betrachtete es. Als ich mit eigenen Augen sah, wie sich das Potentiometer mit der Abtriebswelle drehte, verstand ich sofort, was die Rückmeldung war. Dann habe ich mir mit einem Oszilloskop das Steuersignal angesehen und festgestellt, dass die Hochpegelzeit zwischen 0,5 ms und 2,5 ms lag, was 0 Grad bis 180 Grad entspricht. Die Logik wurde sofort klar.
Das Programm sieht einfach aus. Senden Sie einfach eine PWM, aber es ist nicht einfach, Stabilität zu erreichen. Zuerst habe ich Software-Verzögerung verwendet, um PWM zu simulieren. Dadurch drehte sich das Servo nacheinander. Da der Mikrocontroller andere Aufgaben erledigen musste, wurde die Verzögerung unterbrochen. Später wurde es durch einen Timer-Interrupt ersetzt, und ein Hardware-Timer wurde speziell für die Erzeugung von PWM-Wellen reserviert, und das Servo wurde sofort glatt.
Es gibt noch ein weiteres Detail, das Sie möglicherweise übersehen: den Status des GPIO-Ports zum Zeitpunkt des Einschaltens. Wenn der Pin-Ausgang des Mikrocontrollers beim Starten unsicher ist, ruckelt das Servo heftig, was zumindest einen Schlag verursachen oder im schlimmsten Fall die mechanische Struktur beschädigen kann. Meine Lösung ist: Ziehen Sie beim Einschalten zunächst alle servobezogenen Pins nach unten und bringen Sie sie dann nach Abschluss der Initialisierung langsam in den Zielwinkel. Dieser Trick ist besonders effektiv.
Apropos Jitter: Hier gibt es viele Tricks. Das häufigste Problem ist die Stromversorgung. Der Strom beim Starten des Servos kann auf 1A oder sogar mehr ansteigen. Sollte das Netzteil damit nicht zurechtkommen und die Spannung sinkt, muss der Mikrocontroller auf der Steuerplatine neu gestartet werden. Ich habe eine Handy-Powerbank verwendet, um ein einzelnes Servo mit Strom zu versorgen, und es war sehr stabil.
Eine weitere Sache, die leicht übersehen wird, sind Störungen auf der Signalleitung. Besonders wenn das Servokabel relativ lang ist, wirkt das PWM-Signal wie eine Antenne und ist anfällig für Kopplungsrauschen. Die Lösung ist ebenfalls einfach: Verwenden Sie ein verdrilltes Paar für die Signalleitung oder ziehen Sie es mit einem 1-k-Widerstand direkt auf Masse, wodurch Jitter effektiv unterdrückt werden kann. Wenn Ihre PWM-Frequenz zu weit von den vom Servo benötigten 50 Hz (Periode 20 ms) entfernt ist, führt dies ebenfalls zu einer ungenauen Steuerung.
Es gibt alle Arten von Servos auf dem Markt, und wenn Sie das falsche Projekt auswählen, ist Ihre Arbeit umsonst. Schauen Sie sich zunächst das Drehmoment an, das direkt davon abhängt, ob es Ihre Last antreiben kann. Normalerweise berechne ich das für die Last erforderliche Drehmoment und lasse einen Spielraum von 30 %. Wenn Sie beispielsweise einen Roboterarm bauen möchten, erfordert das am weitesten distal gelegene Gelenk das geringste Drehmoment, sodass die Basis um ein Vielfaches größer sein muss.
Schauen Sie sich dann die Geschwindigkeit anhand der Sek/60°-Anzeige an. Beispielsweise sind 0,12 Sek./60° schneller als 0,18. Beachten Sie jedoch, dass Drehmoment und Geschwindigkeit oft widersprüchlich sind und diejenigen mit höherem Drehmoment normalerweise langsamer sind. Der letzte Punkt ist die Arbeitsspannung und -größe. Sie müssen schauen, ob Ihr Board es sich leisten kann und ob die Strukturteile eingebaut werden können. Die Haltbarkeit von Metallzahnrädern und die Kostengünstigkeit von Kunststoffzahnrädern hängen von Ihrem Budget und Ihren Anwendungsszenarien ab.
Wenn Sie einen Roboter bauen möchten, müssen Sie mehrere Servos gleichzeitig steuern. Es gibt nur ein Dutzend E/A-Ports in einem Block. Eine direkte Ansteuerung ist theoretisch möglich, in der Praxis jedoch nicht beherrschbar und gleichzeitig ist der Anlaufstrom zu hoch. Mein Ansatz besteht darin, eine Servosteuerplatine wie diese I2C-Schnittstellenplatine zu verwenden, die 16 Kanäle verwalten kann. Die Hauptsteuerung sendet nur Befehle und die gesamte PWM wird von ihr erzeugt.
Auch auf die Software sollte man achten. Lassen Sie niemals alle Servos gleichzeitig von 0 Grad auf 180 Grad springen. Der Strom kann Ihre Stromversorgung lahmlegen. Ich habe im Code einen „gestaffelten Start“ vorgenommen, indem ich nur alle 20 ms einen Servoschritt bewegt habe, oder eine langsame Startmethode verwendet habe, um sie langsam zur Zielposition „klettern“ zu lassen, sodass der Strom viel sanfter ist.
Die schlimmste Lektion, die ich gelernt habe, war, dass die Stromversorgung falsch angeschlossen war. Erst als es rauchte, wurde mir klar, dass normale Servos keinen Verpolungsschutz haben. Später habe ich gelernt, Dioden an das Netzkabel zu reihen oder am Stecker zu arbeiten. Ein narrensicheres Design ist sehr wichtig. Es gibt auch eine mechanische Begrenzung. Der Winkel muss im Programm begrenzt werden, sonst schlägt das Servo gegen die Wand und das Getriebe bricht bald zusammen.
Darüber hinaus sollten Sie beim Debuggen nicht nur auf den Code starren, sondern auch der mechanischen Baugruppe mehr Aufmerksamkeit schenken. Einmal zitterte das Servo ständig und nachdem ich drei Tage lang mit dem Programm gekämpft hatte, stellte ich schließlich fest, dass die Pleuelschraube locker war und der Spalt zu groß war. Seitdem habe ich eine Angewohnheit entwickelt: Überprüfen Sie zuerst die Maschine, dann die Schaltung und schließlich den Code. Diese Sequenz hat mir viel Zeit gespart.
Was ist das seltsamste Problem, das Sie jemals bei der Servosteuerung hatten? Lasst uns im Kommentarbereich chatten und gemeinsam lernen. Wenn Sie es nützlich finden, geben Sie ihm ein „Gefällt mir“ und teilen Sie es mit weiteren Freunden, damit jeder reibungslos an dem Projekt arbeiten kann!
Aktualisierungszeit: 12.03.2026
Wenden Sie sich an den Produktspezialisten von Kpower, um einen geeigneten Motor oder ein geeignetes Getriebe für Ihr Produkt zu empfehlen.






















