


























TECHNICAL SUPPORT


Published 2026-02-19
Many friends who play model airplanes or make small robots, when they first come into contact with aservo, the most troublesome question is: How to adjust it to the neutral position? Watching the steering arm swinging back and forth, I was murmuring in my heart. Don’t worry, this is actually a hurdle that every newbie will encounter. Adjusting theservoto the neutral position is the first step to make it listen to you, and it is also the basis for all subsequent precise actions. Today we will talk about this matter, and I guarantee that you will understand it and learn it as soon as you see it.
Simply put, the neutral position of theservois its reference point for "resting" and "ready to go". You can think of it as the 12 o'clock position of a clock, or the steering wheel returning to the straight position. In this position, the servo output angle is 90 degrees, which is the midpoint of its travel. Only by understanding this can you know that turning the servo 45 degrees to the left actually means turning it from the neutral position to 45 degrees, rather than jumping directly from 0 degrees.
Many friends directly inserted the servo arm into the servo, only to find that it was crooked no matter how they were inserted. After tightening the screws, they found that it could not return to the center. This is mainly because there is a potentiometer inside the servo, which requires an electrical signal to determine the reference. If you install it hard without power to the servo, it's just a matter of luck. Just like adjusting the hands of a watch while blindfolded, how can it be adjusted on time? Therefore, before installing the servo arm, the first step must be to power on the servo.
This is the most common and simplest method. First, reset all the trim knobs of the corresponding channels on your remote control to zero. Then, power up the receiver and servo. At this time, the servo will automatically rotate to a position, which is what it currently considers to be 90 degrees. If you find that your servo arm is a little to the left or right after installation, you can use the fine-tuning buttons on the remote control to adjust it step by step until the servo arm is completely parallel to the neutral line you want. ️Remember, fine-tuning is fine-tuning and cannot be corrected in a large range. If it deviates too much, it may be a problem with the servo itself.
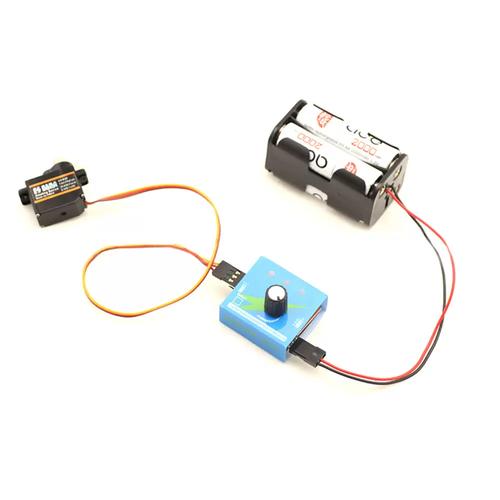
If you are just doing testing, or using microcontroller control and not connecting the remote control, there is a way. You need a device that can output a specific PWM signal, eg. The control signal of the steering gear is a high-level pulse with a period of 20ms, of which the pulse width of 1.5ms corresponds to the neutral position. Write a small piece of code to allow the microcontroller to continuously output a pulse width of 1.5ms to the servo signal line. After power is applied, the servo will stop firmly at its mechanical center point.
To judge whether the servo is really in the neutral position, it is not enough to just look at it. You can find a square ruler, or use the right-angled edge of a piece of A4 paper, and place it against the side of the servo arm and the servo housing. Check whether the servo arm is perpendicular to the edge of the servo housing. Even simpler, you can gently hold the servo arm with your hand and feel the resistance of it swinging left and right. In the neutral position, the resistance to left and right rotation should be basically the same. If it is particularly tight to one side, it must not be in the middle.
When adjusting the steering gear, there are several details that need to be paid attention to. ️First, the power supply to the servo must be stable. If you use a battery, make sure the power is sufficient. Unstable voltage will cause the neutral point to drift. ️Second, if it is a metal gear servo, do not use brute force to break the servo arm, as it may damage the internal gear. ️Third, some digital servos have a "slow start" function. After powering on, it will slowly swing to the neutral point. This is normal. Just wait until it stabilizes before adjusting.
If the neutral position is not adjusted correctly, your plane may keep yawing while flying, the car cannot run in a straight line, and the robotic arm may not be able to grasp things accurately. It's like your steering wheel is always crooked, and you have to pull hard all the time to go straight. It's not only tiring, but also consumes electricity, and the steering gear can easily heat up and burn out. Therefore, spending a few minutes to adjust it correctly will make your subsequent debugging work more efficient and play more smoothly.
Having said all that, I wonder if you have ever encountered any particularly strange phenomenon when adjusting the steering gear? For example, does the servo vibrate on its own, or does it not move at all? Welcome to chat in the comment area, maybe I can help you analyze it. If you find this article useful, don’t forget to give it a like and share it with more friends who play with models!
Update Time:2026-02-19
Contact Kpower's product specialist to recommend suitable motor or gearbox for your product.





















