


























SUPPORTO TECNICO


Pubblicato 2026-03-08
Recentemente, molti amici mi hanno chiesto se vogliono utilizzare il Raspberry Pi per realizzare piccole invenzioni, ma non sanno come realizzarleservomossa. Anche tu hai riscontrato questo tipo di imbarazzo: ilservoè collegato e viene inserito il codice, ma non si muove o trema come se avesse delle convulsioni? Non preoccuparti, questo è in realtà un ostacolo che ogni produttore dovrà affrontare. Oggi ti accompagnerò passo passo per abbattere questo duro osso, in modo che ilservonella tua mano puoi girare obbedientemente all'angolo specificato.
Se vuoi usare un Raspberry Pi per controllare un servo, devi prima capire come "parlano" i due. Il servo non riesce a comprendere i segnali digitali del Raspberry Pi. Riconosce solo un segnale di forma d'onda chiamato PWM (Pulse Wide Modulation). In parole povere, invia impulsi elettrici di diversa ampiezza allo sterzo per dirgli di "girare in posizione centrale" o "girare all'estrema destra". Lo stesso Raspberry Pi dispone di pin PWM hardware, ma il numero è limitato, quindi molte persone utilizzano la simulazione software. Devi solo collegare la linea del segnale del servo al pin GPIO del Raspberry Pi, quindi generare il segnale di impulso corrispondente attraverso la programmazione e il servo sarà in grado di comprendere le tue istruzioni.
Esistono numerosi servi sul mercato e scegliere quello sbagliato può essere problematico. Per iniziare con il Raspberry Pi, ti consiglio vivamente di utilizzare il normale micro servo SG90 da 9 g. Questo piccolo servo è economico e robusto e il voltaggio richiesto è esattamente pari a 5 V che il Raspberry Pi può fornire. Se vuoi fare un lavoro duro, come controllare un braccio robotico, allora devi considerare questo tipo di servo a coppia elevata con ingranaggi in metallo. Tuttavia, vorrei ricordarti che la grande corrente di lavoro del servo potrebbe essere eccessiva per il Raspberry Pi, quindi è meglio alimentarlo separatamente. C’è un altro punto che è facile trascurare. Esistono due tipi di servi: analogici e digitali. Per i principianti è sufficiente l’analogico. La logica di controllo è semplice e diretta.
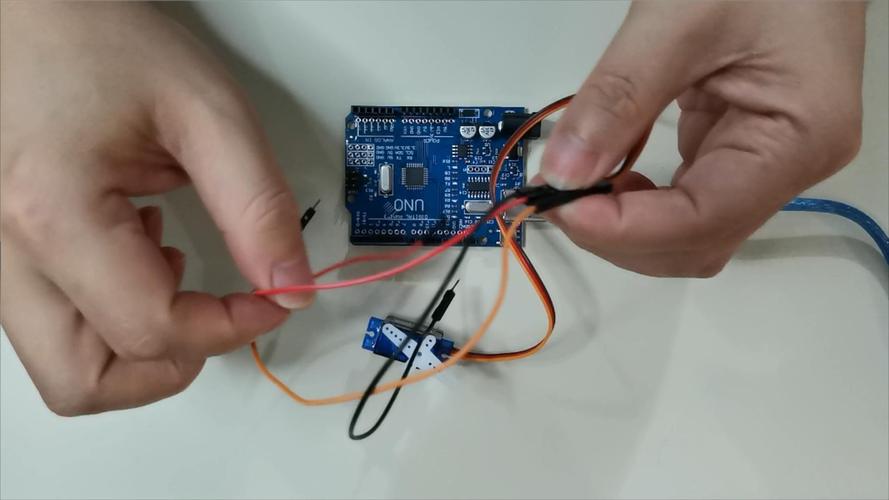
La fase di cablaggio sembra semplice, ma molte persone ci si imbattono. L'errore più comune è collegare i poli positivo e negativo in modo inverso. In un istante si sentirà un odore appiccicoso e il servo verrà demolito. Devi ricordare: il filo rosso va all'alimentatore da 5 V, il filo marrone o nero va a terra e il filo di segnale giallo o arancione va al pin GPIO. Un'altra trappola è l'alimentazione insufficiente. Il pin da 5 V del Raspberry Pi ha una corrente di uscita limitata. Se vengono utilizzati più di due servi, la tensione verrà abbassata, provocando il riavvio del Raspberry Pi. Un approccio sicuro consiste nell'utilizzare un alimentatore esterno solo per il servo e collegare la terra dell'alimentatore alla terra del Raspberry Pi in modo che il segnale possa essere trasmesso normalmente.
Prima di iniziare ufficialmente a scrivere il codice, devi prima comprendere a fondo i segreti dietro la rotazione del servo. L'angolo del servo è determinato da un fattore chiamato "ciclo di lavoro". Usiamo una vivida analogia. È proprio come l'interruttore del rubinetto che usiamo ogni giorno. Più a lungo l'interruttore rimane acceso, maggiore sarà la quantità di acqua che fuoriesce. Nel segnale PWM, maggiore è la percentuale di livello alto, maggiore è l'angolo di rotazione del servo. Per i servi standard, il ciclo è solitamente impostato su 20 millisecondi e il tempo di alto livello è compreso tra 0,5 millisecondi e 2,5 millisecondi, che corrisponde all'intervallo dell'angolo da 0 gradi a 180 gradi. Quando si utilizzano le librerie Raspberry Pi, come RPi.GPIO o quelle più avanzate, è necessario convertire questi tempi in valori di duty cycle. Anche se l'intero processo sembra un po' complicato, fortunatamente le funzioni della libreria sono generalmente incapsulate per te e devi solo fornire direttamente l'angolo desiderato.
Tuttavia, anche se le funzioni della libreria sono state incapsulate, ci sono ancora alcuni dettagli degni di nota durante il funzionamento effettivo. Ad esempio, diversi modelli di servi potrebbero presentare lievi differenze nei parametri, il che richiede di controllare attentamente la documentazione pertinente prima dell'uso per garantire che i parametri impostati corrispondano ai servi reali. Inoltre, quando si scrive il codice, prestare attenzione alla chiara struttura logica del codice e ogni passaggio deve essere rigoroso e accurato. Sebbene le funzioni della libreria semplifichino molte operazioni, se la logica del codice è confusa, potrebbe comunque causare la mancata rotazione del servo come previsto. Allo stesso tempo, durante il processo di debug, dobbiamo essere bravi a utilizzare vari strumenti di debug per scoprire e risolvere tempestivamente possibili problemi, come errori di impostazione del tempo di alto livello, errori di calcolo del ciclo di lavoro, ecc. Solo considerando ogni aspetto in modo completo e meticoloso possiamo garantire che il servo possa ruotare accuratamente secondo le tue istruzioni e raggiungere con successo le funzioni previste.
Se lasci che il servo salti direttamente da 0 gradi a 180 gradi, si rimbalzerà all'improvviso come se fosse spaventato. Ciò non solo renderà rigido il movimento, ma danneggerà facilmente anche il servoingranaggio. Se vuoi che i movimenti abbiano un bell'aspetto, devi usare l'idea del "gradiente". ️ 1. Per prima cosa imposta un angolo iniziale e un angolo target. ️ 2. Calcola quanti passaggi sono necessari nel mezzo. ️ 3. Ruota solo una piccola quantità in ogni passaggio e aggiungi un piccolo ritardo nel mezzo. Ad esempio, se si scrive un ciclo che aumenta di 1 grado ogni volta e ritarda di 20 millisecondi, il servo si muoverà in modo fluido come un braccio reale. Questo metodo è particolarmente pratico quando si fanno camminare i robot o si afferrano i bracci dei robot e l'effetto visivo viene immediatamente migliorato di diversi livelli.
Dopo aver lavorato così duramente per scrivere il programma, il servo trema come pula. Questa situazione è probabilmente dovuta a un problema di alimentazione. Innanzitutto, controlla se l'alimentazione è stabile. Utilizzare un multimetro per misurare la tensione. Se la fluttuazione è ampia, aggiungi un condensatore per filtrarla. In secondo luogo, è possibile che il segnale PWM stesso sia instabile e che il PWM simulato dal software venga facilmente disturbato quando il Raspberry Pi è in esecuzione in multitasking. La soluzione è utilizzare pin PWM hardware o aggiornare la libreria. Questa libreria utilizza la tecnologia DMA (accesso diretto alla memoria) e la precisione del segnale sarà molto più elevata. È anche possibile che la linea del segnale sia troppo lunga e soggetta a interferenze. Prova a utilizzare una linea DuPont più corta o a collegare un piccolo resistore sulla linea del segnale.
Vedendo questo, dovresti essere sicuro di controllare il servo con Raspberry Pi. Sono piuttosto curioso, per quali progetti interessanti pensi di utilizzare questa abilità? È un braccio robotico per afferrare le cose o è un piccolo robot che scuote la testa? Vieni nell'area commenti per parlare dei tuoi pensieri. Se trovi utile questo articolo, ricordati di mettere mi piace e di condividerlo con più amici, così che più persone possano unirsi alla famiglia dei maker.
Tempo di aggiornamento: 08-03-2026
Contatta lo specialista di prodotto Kpower per consigliare il motore o il riduttore adatto al tuo prodotto.




















