


























テクニカルサポート


発行済み 2026-02-16
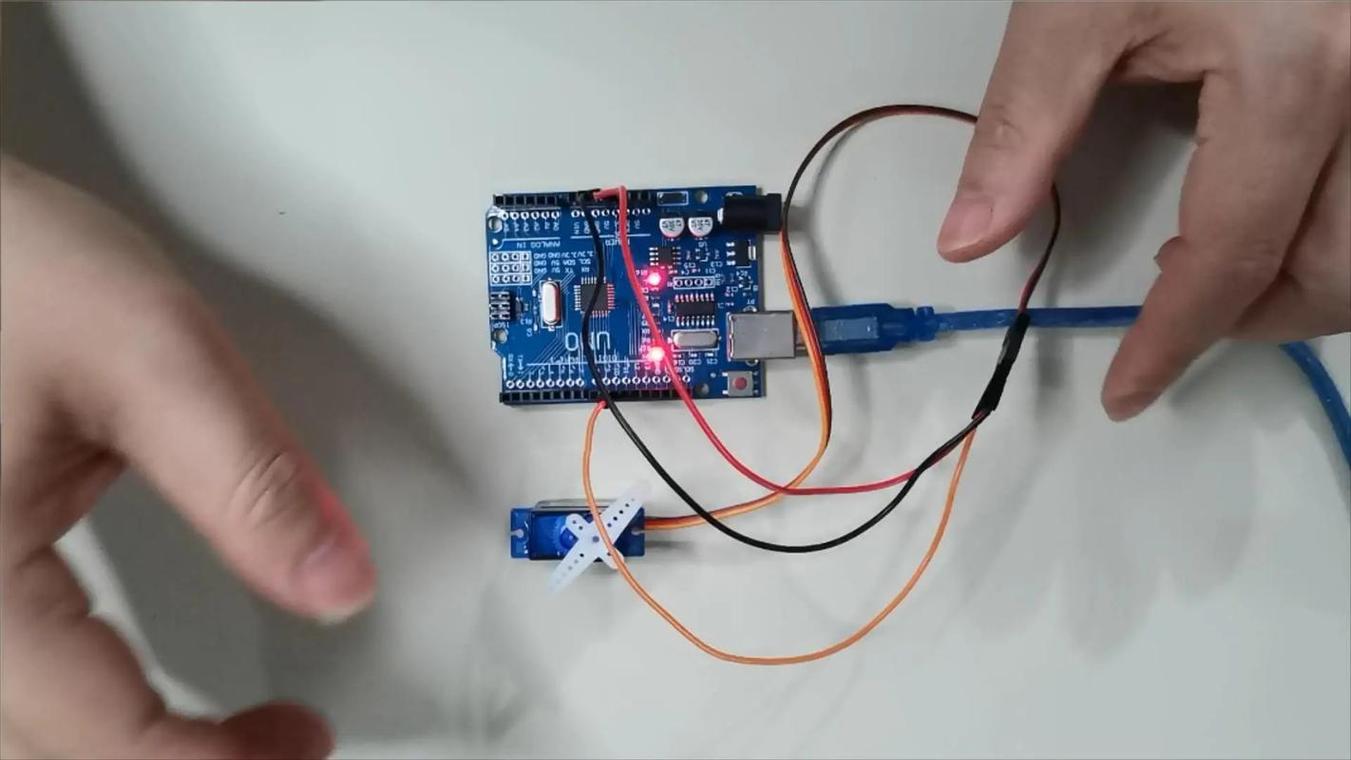
私はちょうどそれを手に入れましたサーボマイクロコントローラーに接続したかったのですが、3 本のワイヤーを見て混乱してしまいました。心配しないでください、これはプレイするほぼすべての初心者が直面する問題ですサーボに遭遇します。実際、配線は思ったよりも簡単です。 As long as you understand what the three wires are for, and follow the steps step by step, you can be sure to get theサーボ30分以内に移動します。
サーボから伸びている3本の線は、通常、電源線、アース線、信号線です。電源線は通常赤で、マイクロコントローラーの 5V ピンに接続され、サーボに電力を供給します。アース線は茶色または黒色で、回路がループを形成できるようにマイクロコントローラーの GND ピンに接続されます。信号線は通常オレンジまたは黄色で、マイコンのPWM出力ピンに接続され、サーボの回転角度を制御するために使用されます。色に対応する機能を理解することが確実な第一歩です。
色に従って接続しているのにサーボが動かない場合は、電源不足が考えられます。マイコン自体の5Vピン電流には制限があり、サーボのビッグイーターを駆動することができません。この場合、サーボがわずかに振動するだけで回転しない場合や、まったく反応しない場合があります。バッテリパックや電圧安定化モジュールなどの別の外部電源をサーボに接続し、電源のアース線をマイコンのアース線に接続してみてください。信号線は変化しないため、問題は通常は解決されます。
電源の選択は、使用するサーボの種類によって異なります。一般的な小トルクサーボであれば動作電流は数百ミリアンペアで、数本の乾電池や携帯電話のモバイルバッテリーなどで改造すれば駆動可能です。高トルクの金属サーボの場合、動作電流が数アンペアに達する場合があるため、特殊モデルの航空機用バッテリーや高出力電圧安定化モジュールの使用を検討する必要があります。重要なのは、サーボの公称動作電圧とロックされたローター電流を確認することです。実用的に使用するには、このパラメータに従って 20% のマージンを追加します。
配線が終わったらコードを書いていきます。マイコンの信号線が入っているピンに、サーボをシミュレートするために必要な制御信号であるPWM波を出力する必要があります。一般に、ステアリング ギアには 50 Hz の周波数が必要で、これは 20 ミリ秒のサイクルを意味します。このサイクルでは、ハイレベル時間は 0.5 ミリ秒から 2.5 ミリ秒の間で、サーボの 0 度から 180 度に対応します。多くのマイコンのライブラリ関数には、既製のサーボ ライブラリが含まれています。これらの複雑な時間を自分で計算することなく、書き込み角度を直接呼び出すことができます。
ロボットを動かしたい場合、サーボ 1 つでは絶対に不十分です。複数のサーボを配線する場合、電源が大きな問題となります。このとき、マイコンの電源を使用することは考えないでください。外部電源を使用する必要があり、その電源は十分な大きさである必要があります。すべてのサーボの赤いワイヤをまとめて電源の正極に接続し、黒いワイヤをまとめて電源の負極とマイクロコントローラの共通グランドに接続します。信号線はそれぞれマイコンの異なる PWM ピンに接続されます。このようにして、各サーボをプログラム内で独立して制御し、連携して動作させることができます。
角度は書いてあることもありますが、サーボの位置は必ずずれてしまいます。これは、特に配線が比較的長い場合、信号ラインでの干渉が原因である可能性があります。信号線と電源アース線を一緒にツイストしてみると、ある程度の干渉防止効果が得られます。また、サーボ内部のポテンショメータにも物理的な誤差があります。コード内のパルス幅範囲をわずかに調整し、微調整して角度をより正確にすることができます。長期間の使用により精度が低下する場合は、サーボ自体が摩耗している可能性があり、交換が必要です。
何かが燃えるのは、通常、過大な電流または間違った配線が原因です。配線前に必ず電源電圧を再確認してください。高圧電源をサーボに直接接続しないでください。サーボに電力を供給する外部電源のマイナス極は、統一されたリファレンスレベルを形成できるようにマイコンのGNDに接続する必要があります。プログラムをデバッグするときは、電源投入時にサーボが突然下に傾いて過剰な電流が発生するのを防ぐために、電源を投入する前にサーボを中間の角度に置くことができます。サーボが熱くなったり異音を感じた場合は、すぐに電源を切り確認してください。
この内容が、ステアリングサーボ制御の第一歩を踏み出す一助となれば幸いです。考えてみてください。配線やプログラミングをしているときに最も悩まされる具体的な問題は何ですか?コメント欄であなたの経験についてチャットしてください。役に立つと思ったら、忘れずに「いいね」を付けて、それを必要とするさらに多くの友達と共有してください。
更新時間:2026-02-16





















