


























テクニカルサポート


発行済み 2026-02-23
理解できないサーボドライブモジュール?心配しないでください、この記事を読めば理解できます
製品イノベーションに慣れていない友人の多くは、製品を使用するときにいつも同じ場所で行き詰まってしまいます。サーボs: なぜそうではないのですかサーボ電源に直接接続されているときは動かずに購入するのでしょうか?壊れていますか?実際、これはサーボの問題ではなく、重要な「仲介者」であるサーボドライブモジュールが欠けていることです。簡単に言えば、サーボ ドライブ モジュールは、主要な制御脳 (マイクロコントローラーなど) とサーボ自体を接続するブリッジです。制御信号を解釈し、サーボを希望の角度に正確に回転させるのに十分な電力を供給する役割を果たします。これがないと、自分の思考とサーボの動作の間に壁ができてしまい、コミュニケーションが取れなくなります。
「電源を入れるとモーターが回り始めるのではないか?」と思われるかもしれません。ステアリング ギアは本質的にはモーターですが、減速ギアとフィードバック回路が統合されており、精密な閉ループ システムになっています。安定した 5V 電源に直接接続すると、確かに「電源が入ります」が、愚かにも固定位置に移動するか、指示を受けていないため動かないままになります。必要なのは、「今何度回転すべきか」を伝えるための周期的なパルス信号 (よく PWM 波と呼ばれるもの) です。メイン制御チップはこの信号を生成できますが、出力電流が小さすぎます。細い水道管を使って大きな水車を動かすのと同じで、まったく押すことができません。このとき、動力を供給するためにドライブモジュールの大型ウォーターポンプが必要になります。
信号の分離と増幅、安定した電源供給という2つのコア機能を備えています。まず、メイン制御チップから微弱な PWM 信号を受信し、信号が送信中に歪まず、サーボが正確に認識できるように整形および強化します。次に、より重要なことは、サーボに強力で独立した電源インターフェイスを提供することです。サーボの起動時または停止時には、サーボの電流が非常に大きくなります。電源がメイン制御基板から直接取られる場合、メイン制御チップが焼損したり、システム電圧が突然低下したり、再起動がクラッシュしたりする可能性が高くなります。ドライブモジュールは信頼性の高い電源のようなもので、メイン制御脳を干渉から保護しながら、外部電源からサーボにエネルギーをスムーズに供給します。
市場にはあらゆる種類のドライバー モジュールがあります。圧倒されてしまったらどうすればいいでしょうか?これらの点だけは覚えておいてください。️まずはチャンネル数を見てみましょう。プロジェクトで使用されるサーボの数は、チャネルの数によって異なります。たとえば、単純なロボット アームを制御するには 6 つのチャネルが必要な場合があります。あまり買わないでください。️第二に、電圧と電流を見てください。これが最も重要なことです!モジュールがサポートする電圧範囲がサーボの動作電圧 (通常は 5V または 6V) と一致するかどうかを必ず確認し、モジュールが連続出力できる最大電流に注意してください。サーボが高トルクメタルサーボの場合は、10A以上の電流を出力できるモジュールを選択する必要があります。小さなモジュールに制限されないでください。 ️3番目、通信インターフェイスを見てください。。最も一般的なのは I2C インターフェイスで、わずか 2 本のワイヤで数十のサーボを制御でき、メイン制御のピン リソースを節約でき、特に初心者に優しいです。
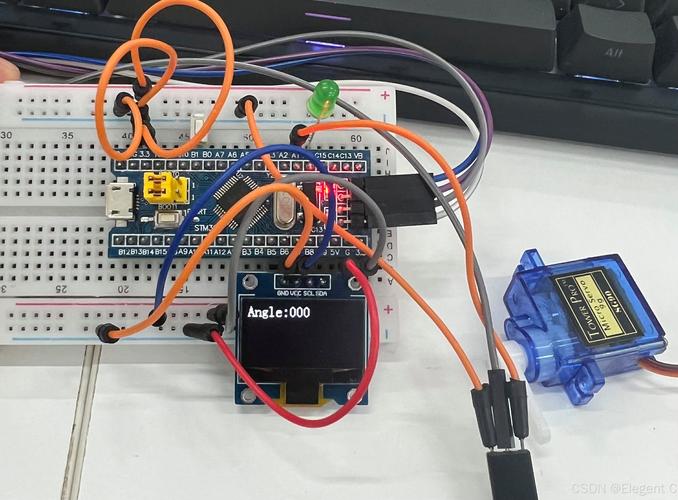
実際は、ブロックを積み上げるのと同じように、思ったよりも簡単です。最初のステップは、モジュールに電力を供給することです。外部電源 (バッテリー パックなど) の正極と負極をモジュールの電源入力端子に接続します。プラス極とマイナス極を逆にすると発煙の原因となりますのでご注意ください。 2 番目のステップはサーボを接続することです。サーボ信号線 (通常は黄色または白の線) をモジュールの信号出力ポートに接続します。赤い線がプラス極に接続され、茶色または黒い線がマイナス極に接続され、1 対 1 に対応します。 3 番目のステップは、メイン コントロールを接続することです。Dupont ワイヤを使用してモジュールの I2C インターフェイス (SDA および SCL) を STM32 に接続し、次に共通グランド (GND から GND) に接続します。ハードウェアの接続は完了しました。あとは、ライブラリ ファイルを呼び出して制御信号を生成する数行のコードを記述するだけです。
最も直感的なメリットは、プロジェクトの安定性が飛躍的に向上することです。以前は、サーボが動くとすぐにマイクロコントローラーが再起動することがありました。ドライバーモジュールを追加すると、電源は安定して絶縁されて供給されるようになり、この厄介な問題は二度と発生しません。さらに、高品質ドライバーモジュールによって出力される PWM 波形は、よりクリーンで正確になり、サーボの回転はよりスムーズになり、ジッターが少なくなります。これは、正確な角度制御が必要なロボットやジンバルにとって非常に重要です。配電や信号干渉などの根本的な問題について心配する必要はもうありません。製品の機能革新とアルゴリズムの実装にすべてのエネルギーを集中できるため、開発効率が 2 倍になります。
そこに行ったことがある者として、注意を喚起させてください。 1.電力供給が不十分です: 大型サーボに電力を供給するために携帯電話の充電器を使用する人はたくさんいます。その結果、重い物体を引っ張ると電圧が切れ、モジュールが赤く点滅したり、シャットダウンしたりすることがあります。必ず総消費電力を計算し、十分な電力を備えた電源アダプターまたはバッテリーを選択してください。 2.配線の緩み:サーボが回転すると大きく振動します。配線端子の差し込みが不十分であったり、ネジの締め付けが不十分であったりすると、移動中に突然断線しやすく、制御不能となることがあります。すべての接続をしっかりと行い、必要に応じて接着剤で固定することをお勧めします。 3.熱放散を無視する: 高電流で連続動作すると、ドライバーモジュールのチップが非常に熱くなります。モジュールにヒートシンクがない場合は、ヒートシンクを取り付けるか積極的に熱を放散することを検討してください。そうしないと過熱保護が機能しません。
これを見て、サーボドライブモジュールについてすでに理解できましたか?実際、適切なものを選択してうまく活用すれば、創造的な実現への道は半分以上成功するでしょう。あなたが取り組んでいるプロジェクトで、サーボを使用してどのようなクールなアクションを実現するつもりですか?コメントエリアでの共有を歓迎します。一緒にコミュニケーションを取り、議論しましょう。この記事が役に立ったと思われる場合は、「いいね」を押して、それを必要とするさらに多くの友達と共有することを忘れないでください。
更新時間:2026-02-23





















