


























テクニカルサポート


発行済み 2026-02-25
で遊ぶときは、サーボ、プログラムが書かれているにもかかわらず、サーボ揺れ続けたり、PPT のように動きが止まったりしますか?実際、これはおそらくタイミングが正しくないためです。特に6チャンネルUSBを使用する場合サーボMicro のようなコントローラーでは、どのサーボを選択するかよりも、その「パルス」リズムを理解することが重要です。今日はこれをスムーズに進め、プロジェクトをスムーズに進める方法についてお話します。
ステアリングギアの回転速度は、端的に言えば制御信号のパルス幅の変化率です。 Micro を使用すると、スクリプトまたは命令を通じて、各チャンネルが現在の角度から目標の角度に到達するのにかかる時間を微調整できます。たとえば、ロボット アームを 0.1 秒以内に飛び出すのではなく、2 秒以内に優雅に持ち上げたい場合は、コマンドで「速度」または「時間」パラメータを設定する必要があります。その内部は、スムーズな動きを実現するために中間に送信する必要のある遷移パルスの数を計算するのに役立ちます。実際に使用する場合は、まず手動でテストして適切な運動時間を見つけてから、それをコードに書き込むことができます。
サーボが震えても、サーボの品質のせいにしないでください。ジッタは、サーボの内部回路と制御信号の更新周波数が合っていない、あるいは電源が不足していることが原因で発生することが多いです。 Micro には強力な電圧安定化機能と信号処理機能がありますが、電源リップルが大きすぎる場合、または複数の高トルク サーボを同時に駆動して電圧が引き下げられた場合、サーボ内の制御チップが「風を引き込み」、それが前後のジッタとして現れます。また、信号ラインにモーターなどの強い干渉源が近づくと、ノイズが混入しやすくなります。まず電源をチェックし、マルチメータを使用してダイナミック電圧を測定します。多くの場合、問題は解決されます。
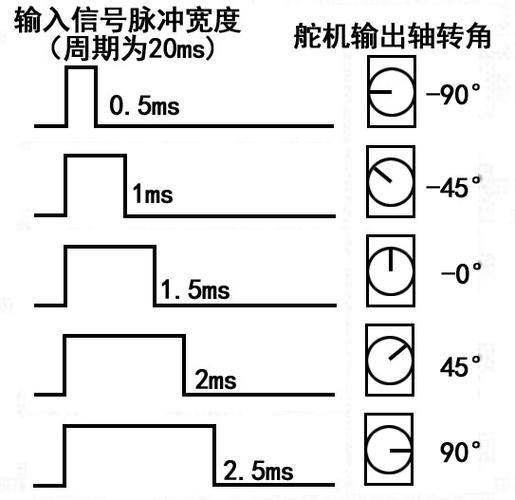
デフォルトでは、Micro のサーボ パルス範囲は通常 1000μs ~ 2000μs に設定されており、これは 0 ~ 180 度に相当します。ただし、実際の動作では、多くの国産サーボは 500μs ~ 2500μs など、より広いストローク範囲を持ち、200 度を超えて回転することもできます。
サーボが指定された角度まで回転できない場合、または回転の途中で動かなくなる場合は、ソフトウェアで各チャネルの最小および最大パルス幅を校正する必要があります。この操作は複雑ではありません。チャンネルを選択し、スライダーを手動でスライドさせ、サーボの実際の回転限界を注意深く観察して、対応する値を入力するだけです。このようにして、ステアリングギアを損傷から効果的に保護し、その可能性を最大限に活用することができます。
制御のために USB からシリアル ポートを使用する場合、最も一般的なエラーはボー レートの不一致です。ソフトウェアではデフォルトのボーレートは9600ですが、これをコードに記述すると確実に通信できなくなります。さらに、指導形態の問題もあります。使用されるコンパクトなプロトコルには、データ検証に対する非常に厳しい要件があります。単なるバイト送信エラーであっても、そのまま無視されます。まずは公式のテスト ソフトウェアを使用して簡単なコマンドを送信することをお勧めします。デバイスが正常に動作する場合は、自分で作成したコードを注意深く確認してください。また、半二重通信時にトランシーバーとトランシーバーを切り替える際に発生する遅延も忘れてはいけません。この状況は非常に迅速に処理されますが、命令が高頻度で継続的に送信される場合、数ミリ秒の遅延を追加すると通信がより安定します。
同時に、注意を払う必要がある他の側面もいくつかあります。 USB-シリアルデバイスを接続するときは、インターフェースが安定していて緩んでいないことを確認してください。そうしないと、データ転送の安定性に影響する可能性があります。さらに、オペレーティング システムが異なれば互換性も異なる場合があるため、デバッグ プロセス中にオペレーティング システムのバージョンを十分に考慮する必要があります。通信が不安定な場合は、ボーレート、コマンド形式、遅延、その他の一般的な問題を確認するだけでなく、USB インターフェイスを変更するか、コンピューターを再起動して、潜在的な干渉要因を排除し、さまざまな環境で安定した正確な制御を確保することもできます。
6つのサーボを1つずつ動作させるのではなく、同時に連携動作させたい場合は「スクリプト」機能を使うのがポイントです。ここでスクリプトを慎重に記述し、各チャネルのターゲット位置と移動時間を慎重に設定してから、コントローラにスクリプトを独立して実行させることができ、リアルタイムでコマンドを送信するためにコンピュータに依存する必要がなくなります。このようにして、コンピューターがフリーズした場合でも、ロボット アームは一連の複合アクションをスムーズに完了できます。
ホストコンピュータ経由でリアルタイム制御を行う場合、ネットワーク遅延による同期ずれを避けるため、全チャンネルの目標角度をまとめて送信する「多チャンネル同時コマンド」を有効にする必要があります。
サーボが動かなくなった場合は、お腹が空いている可能性があります。各サーボは、ロック時に数アンペアの電流を消費する可能性があります。 6個連携すると瞬間電流は軽く20Aを超えます。 USB電源だけを使用すると、持ち運べないだけでなく、パソコンのマザーボードが焼けてしまうこともあります。正しいアプローチは、別の電源を用意し、サーボ電源コードを十分な電力のあるバッテリーまたはスイッチング電源に直接接続し、USB 経由でのみ信号を受信できるようにすることです。電源のアース線とコンピュータのアース線は同じアースに接続する必要があることに注意してください。そうしないと、信号がランダムに浮遊します。電源が確保されていれば、スタッタリングやジッタリングのほとんどは解決できます。
これを見ると、ステアリングギア制御がそれほど神秘的ではないことがわかりますか?実際、多くの問題は細部に潜んでいます。プロジェクトに取り組んでいるときにこれまで遭遇した中で最も難しいステアリングギアの問題は何ですか?あなたの「血と涙の歴史」をコメント欄で共有して、一緒に落とし穴を避けましょう。この記事が役に立ったと思われる場合は、サーボをプレイするより多くの友人に見てもらえるように、「いいね」を押して転送することを忘れないでください。
更新時間:2026-02-25





















