


























テクニカルサポート


発行済み 2026-02-07
そんなトラブルに遭遇したことはありませんか?愛用の小型飛行機や小型ロボットに自動格納式着陸装置を設置したいが、スペースが狭くて普通ではないサーボが入らないのか、パワーが足りず引込脚が柔らかいのか?これは、多くの DIY 愛好家や製品開発者にとって頭の痛いところです。実際、この問題を解決する鍵となるのは、小さな「マイクロステアリングギア」であることが多いです。サイズが小さく強力で、このようなコンパクトなスペースで正確なモーション制御を行うために特別に設計されています。今日は、格納式着陸装置の問題を解決するためにこれを使用する方法について話しましょう。
まず第一に、着陸装置の格納と格納は簡単な作業ではないことを理解する必要があります。ロックまたはリリースを完了するには、瞬時に機体の重量に耐える必要があります。そのためにパワーユニットには「強力な短期爆発力」が求められます。マイクロステアリングギヤは小型でありながら、内部のギヤセットが最適化されており、短時間で大きなトルクを出力することができ、まさに断続的高負荷作業特性に適しています。
スペースには厳しい制約があります。ドローンの腹部であっても、小型の固定翼の内部であっても、着陸装置を設置できるスペースは非常に限られています。マイクロの共通仕様サーボ9グラム、5グラム、あるいはそれより小さいものもあります。全体の空力形状や構造強度を損なうことなく、狭いレイアウトに簡単に埋め込むことができます。これは大型サーボにはない利点です。
選ぶときは、重さやサイズだけを見てはいけません。 2 つの最も重要なパラメータはトルクと速度です。ランディングギアの場合、トルクが不足すると格納や格納が不完全になったり、固着したりすることがあります。一般に、実際に測定された抵抗値より少なくとも 30% 大きい、安全マージンを残したトルクを持つモデルを選択する必要があります。速度パラメータは、着陸装置が格納および格納される速度を決定します。遅すぎると効率に影響します。速すぎると影響が大きくなりすぎる可能性があります。
また、ステアリングギアの材質とギアの種類にも注意してください。金属製のギアサーボはプラスチック製のギアよりもはるかに耐久性があり、着陸装置の格納および格納時に発生する可能性のある衝撃に耐えるのに適しています。同時にサーボがデジタル信号に対応しているかどうかも検討してください。通常、デジタル サーボは位置決め精度が高く、応答速度が速いため、着陸装置のロック位置がより正確で信頼性が高くなります。
実際の配線は非常に簡単ですが、順序を間違えてはなりません。マイクロサーボには通常、プラス電源 (赤)、マイナス電源 (茶色または黒)、信号線 (黄色または白) の 3 本のワイヤがあります。対応する受信機チャンネルまたは独立したサーボコントローラーに接続する必要があります。電源電圧がサーボの定格範囲内であることを確認してください。高すぎると燃え尽きてしまい、低すぎると無力になります。
着陸装置を送信機の他のチャンネルと混合するのではなく、独立して制御したい場合、別の受信機チャンネルを使用し、それを送信機の別のスイッチ (2 ポジション スイッチなど) に割り当てることが最善の策です。これにより、指一本の動きで降着装置の「格納」と「解放」を直接制御することができ、直感的かつ安全に操作できます。
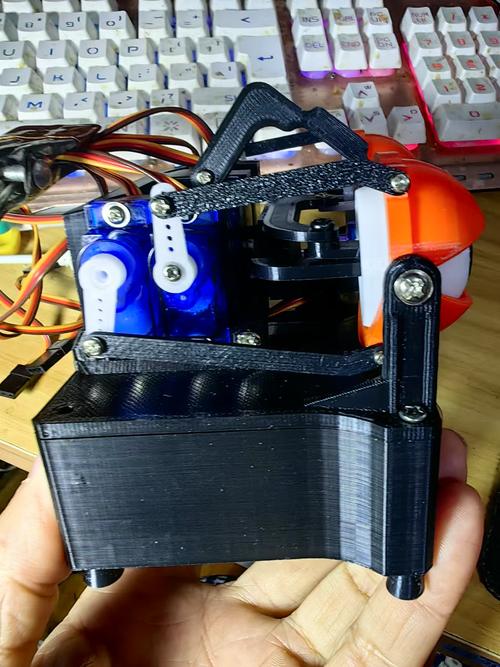
インスタレーションの核となるのは堅牢性と精度です。動作中のサーボの揺れを防ぐために、サーボ用に頑丈な取り付けベースを設計または選択する必要があります。固定ネジはしっかり締めますが、力を入れすぎるとサーボハウジングが破損することがありますのでご注意ください。ステアリングギアの出力ロッカーアームとランディングギアリンクとの接続は、多少の取り付け誤差を考慮してボールジョイントバックル等の動きに余裕のある部品を使用するのがベストです。
設置時には、ステアリングギアロッカーアームの回転軌跡がランディングギアの運動軌跡と一致しているか、干渉がないかを確認するために、格納と格納のプロセスを繰り返しシミュレーションする必要があります。サーボが極端な位置まで回転したときに、着陸装置がちょうど「完全に格納された」ロック ポイントに到達したか、または「完全に伸長した」ロック ポイントに到達したかに特に注意してください。コンロッドの長さを事前に定規で測って計算しておくと、後から調整する手間が省けます。
デバッグの最初のステップは、サーボの中立点とストロークを設定することです。リモコンまたはデバッグソフトウェアを使用して、まずサーボをセンターに戻します。このとき、脚は中間可動状態になっている必要があります。次に、「後退」と「伸長」の 2 つの終点の位置をそれぞれ設定して、着陸装置が所定の位置に移動してロックされるようにすると同時に、サーボの失速を回避します (つまり、ロッカー アームが最後まで回転し、まだ力が加えられている状態)。
次に、負荷テストを実行します。ランディングギアに手で疑似抵抗を与え、格納と格納を繰り返して、サーボがスムーズかつ強力に駆動できるかどうかを観察します。音を聞いてください。スムーズなギア音は正常です。異常なカタカタ音やシューシュー音がある場合は、負荷が大きすぎるか、機械的干渉がある可能性があります。インストールとリンクのメカニズムを戻って確認する必要があります。
最も明白な利点は、高度なシステム統合と軽量化です。マイクロステアリングギアによって直接駆動されるため、複雑なソレノイドバルブ、エアポンプ、大型リニアモーターが不要になります。システム全体が非常にシンプルになり、障害点が少なくなります。軽量化を追求する航空機の場合、重量が 1 グラム減るごとに、耐久性が向上し、操縦性が向上します。
第二に、コストは制御可能であり、維持が容易です。マイクロサーボは、価格が透明で交換が容易な成熟した標準部品です。たとえ故障しても、専用の駆動部品をカスタマイズすることなく、すぐに代替品を見つけることができます。このモジュール設計のアイデアにより、プロジェクト全体の開発リスクとその後のメンテナンスコストが大幅に削減されます。
着陸装置の格納と格納におけるマイクロ サーボのさまざまな素晴らしい用途について学びました。では、現在または将来の創造的なプロジェクトのうち、このコンパクトで強力なソリューションの使用を最初に考えたのはどれですか?コメント欄でご意見を共有してください。この記事が役立つと思われた場合は、「いいね」を押して、助けを必要としているより多くの友達と共有することを忘れないでください。
更新時間:2026-02-07





















