


























テクニカルサポート


発行済み 2026-02-08
基本的なデジタル出力に飽きていて、「動く」クールなものを手に入れたいと思っていませんか?たとえば、リモコンで操作できるロボット アーム、自動的に開閉するカーテン、首を回して挨拶する小型ロボットを作成しますか?これらのアイデアを実現するための核心は、ステアリングギアが赤外線リモコンを受信できるようにすることです。少し専門的に聞こえますが、実際には、いくつかの重要なポイントを理解して、赤外線受信機と赤外線受信機を接続するだけで、サーボ、オブジェクトを遠隔制御するための新しいスキルを簡単にロック解除できます。
初めての友達もたくさんサーボアプリケーションは問題に遭遇します。デバイスをリモートで制御したい場合、毎回コンピュータに戻ってコードを変更し、プログラムを再アップロードする必要がありますか?これはとても非現実的です。たとえば、スマート植木鉢用の日よけを作りたい場合、太陽光に応じて 1 日数回手動で調整する必要がありますか?
赤外線リモコンは、この「最後のメーター」制御の問題を解決します。データケーブルの束縛から解放され、コマンドを実行できるようになります。サーボテレビのリモコンと同じように、あらかじめ設定した角度に回転します。この方法は非常に低コストであり、一般的な家電製品のリモコンや赤外線送信モジュールで実現できます。瞬時の非接触対話を必要とする革新的なプロジェクトに非常に適しています。
プロジェクトの対話性と完了性が大幅に向上します。遠隔操作のコマンドに応答できる作品は、静的な「モデル」から動的な「デバイス」に即座にアップグレードされ、ユーザーエクスペリエンスは飛躍的に向上します。 2 番目に、複雑な制御ロジックが簡素化されます。サーボ用の複雑な連続動作アルゴリズムを記述する必要はなく、1 つのボタンで正確な角度に対応できます。
コストと学習曲線の点でも、赤外線ソリューションは非常に使いやすいものです。赤外線受信機と送信機のセットの価格はわずか数元で、関連するコード ライブラリ ( など) はすでに非常に成熟しており、参考用の既製のケースがインターネット上に多数あります。これは、基礎となる通信プロトコルを深く掘り下げるのではなく、クリエイティブな実装に集中できることを意味します。
プロジェクトの場合、最も一般的な選択肢は統合型赤外線受信機などです。ピンは VCC、GND、OUT の 3 つだけなので、接続が非常に簡単です。動作電圧 (通常は 3.3 V または 5 V) に注意し、それが開発ボードと一致していることを確認する必要があります。
選ぶ際にハイエンドモデルを追い求める必要はありません。このユニバーサル受信機は、市販されているほとんどの 38kHz キャリアリモコン (古いテレビやエアコンのリモコンなど) と互換性があります。重要なのは、プロジェクトシェルに取り付けることであり、信号受信への影響を避けるために、赤外線受信窓の前に暗い材料や不透明な材料があってはなりません。
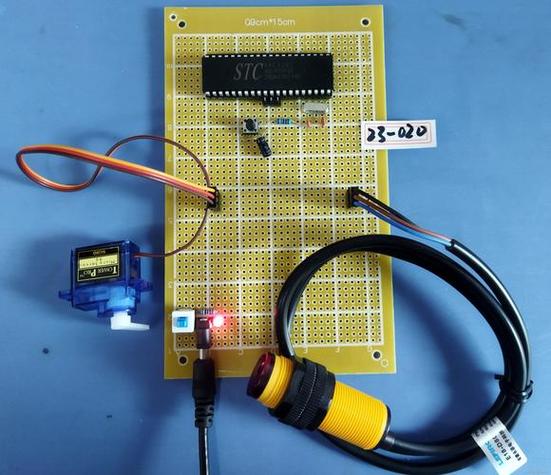
ハードウェア接続は最初のステップであり、エラーが発生しやすいステップです。サーボへの電力供給が重要です。9V バッテリーのみを使用してサーボに電力を供給し、5V ピンからサーボに電力を供給すると、サーボが回転してフリーズすると、システム全体が簡単に再起動してしまいます。正しいアプローチは、サーボに個別に電力を供給するか、十分な電流を供給できる共有電源を使用することです。
推奨配線順序: まず、赤外線受信機の VCC、GND、OUT をそれぞれ 5V、GND、特定のデジタル ピン (11 番など) に接続します。次に、サーボの信号線 (通常はオレンジまたは白) を PWM をサポートするデジタル ピン (9 番など) に接続します。赤い線はプラス極に接続され、茶色の線はマイナス極に接続されます。電源を入れる前に、すべてが正しいことを確認してください。
最初に「」ライブラリを IDE にインストールする必要があります。コードの先頭でこのライブラリを導入し、赤外線受信ピンとサーボピンを定義します。初期化部分では、赤外線受信機とサーボオブジェクトを起動します。メインループでは、中心となるタスクは赤外線信号が受信されているかどうかを常にチェックすることです。
ライブラリが提供するデコード機能を使用すると、受信した赤外線信号を特定の数値コードにデコードできます。各キーは一意のコードに対応します。これらのコードをシリアル モニターから印刷して記録し、リモコンのボタンを押すことができます。次に、「if」ステートメントを使用して判断します。コード A を受信した場合は、サーボを 30 度回転させます。コードBを受信した場合は、サーボを120度回転させます。
リモコンを使用して、使用する予定のいくつかのボタンに対応する赤外線コードをテストし、記録します。次に、これらのコードに対応するステアリング ギア制御関数をコード内に記述します。サーボライブラリの「write()」関数では角度を直接指定することができ、通常は0度から180度の範囲で指定できます。
制御をよりスムーズにするために、角度が変化するときに小さな遅延を追加できます。さらに、サーボが繰り返し震えることを防ぐために、同じ信号を連続して受信した場合は無視するなど、いくつかのエラー処理メカニズムを追加することを検討してください。コードの作成とアップロードが完了したら、リモコンを受信機に向けてボタンを押すと、それに応じてサーボが動くはずです。応答がない場合は、戻って配線、電源、赤外線エンコーディングが正しいかどうかを確認してください。
試してみてください。ボタンひとつで固定角度の制御を始め、リモコンの楽しさをすぐに体験できます。赤外線リモコンサーボを使用して最初にやりたいクリエイティブなプロジェクトは何ですか?コメント欄でご意見を共有してください。この記事が役立つと思われた場合は、「いいね」を押して、助けを必要としているより多くの友人と共有することを忘れないでください。
更新時間:2026-02-08





















