


























SUPORTE TÉCNICO


Publicado 2026-02-25
Ao brincar com oservo, você já se deparou com esse constrangimento: mesmo que o programa esteja escrito, oservocontinua tremendo ou o movimento fica preso como um PPT? Na verdade, isso provavelmente ocorre porque o momento não está correto. Especialmente ao usar um USB de 6 canaisservocontrolador como o Micro, entender seu ritmo de "pulso" é mais importante do que qual servo você escolhe. Hoje vamos falar sobre como tornar isso mais tranquilo e fazer com que seu projeto flua sem problemas.
A velocidade de rotação da caixa de direção é, para ser franco, a taxa de mudança da largura de pulso do sinal de controle. Micro nos permite ajustar o tempo que cada canal leva para ir do ângulo atual ao ângulo alvo por meio de scripts ou instruções. Por exemplo, se você deseja que o braço robótico se levante normalmente em 2 segundos, em vez de ejetar em 0,1 segundos, você deve definir o parâmetro "velocidade" ou "tempo" no comando. Seu interior o ajudará a calcular quantos pulsos de transição precisam ser enviados no meio para obter um movimento suave. No uso real, você pode primeiro testá-lo manualmente para encontrar a duração apropriada do exercício e depois escrevê-lo no código.
Se o servo tremer, não culpe a qualidade do servo. Muitas vezes, o jitter ocorre porque a frequência de atualização do sinal de controle não corresponde ao circuito interno do servo ou a fonte de alimentação é insuficiente. Embora o Micro tenha poderosas capacidades de estabilização de tensão e processamento de sinal, se a ondulação da sua fonte de alimentação for muito grande, ou se você acionar vários servos de alto torque ao mesmo tempo e a tensão for reduzida, o chip de controle dentro dos servos irá "atrair o vento", que aparecerá como tremulação para frente e para trás. Além disso, se a linha de sinal for abordada por fortes fontes de interferência, como motores, poderá ser facilmente introduzido ruído. Primeiro verifique a fonte de alimentação e use um multímetro para medir a tensão dinâmica. Muitas vezes o problema está resolvido.
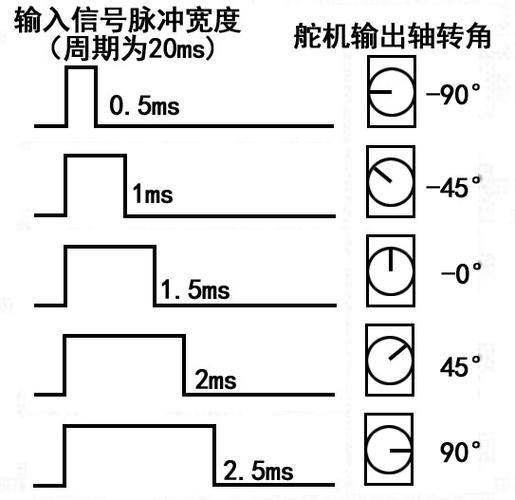
Por padrão, a faixa de pulso servo do Micro é geralmente definida para 1000µs a 2000µs, o que corresponde a 0 a 180 graus. No entanto, na operação real, muitos servos domésticos podem ter uma faixa de curso mais ampla, como 500 µs a 2.500 µs, e podem até girar mais de 200 graus.
Se você achar que o servo não consegue girar no ângulo especificado ou fica preso no meio da rotação, é necessário calibrar a largura de pulso mínima e máxima de cada canal no software. Esta operação não é complicada. Você só precisa selecionar o canal, deslizar o controle deslizante manualmente, observar cuidadosamente o limite de rotação real do servo e preencher o valor correspondente. Desta forma, o mecanismo de direção pode ser efetivamente protegido contra danos e todo o seu potencial pode ser totalmente utilizado.
Ao usar USB para porta serial para controle, o erro mais comum é a incompatibilidade da taxa de transmissão. No software, a taxa de transmissão padrão é 9600. Porém, se você escrever isso no código, a comunicação definitivamente não será possível. Além disso, há também a questão do formato das instruções. O protocolo compacto utilizado possui requisitos extremamente rígidos para verificação de dados. Mesmo que seja apenas um erro de transmissão de bytes, será ignorado diretamente. Recomenda-se primeiro usar o software de teste oficial para enviar comandos simples. Se o dispositivo funcionar normalmente, verifique cuidadosamente o código que você mesmo escreveu. Além disso, não se esqueça do atraso que ocorre ao alternar entre transceptores e transceptores durante a comunicação half-duplex. Embora esta situação seja resolvida muito rapidamente, adicionar alguns milissegundos de atraso tornará a comunicação mais estável quando as instruções forem enviadas continuamente em alta frequência.
Ao mesmo tempo, existem alguns outros aspectos aos quais precisamos prestar atenção. Ao conectar um dispositivo USB para serial, certifique-se de que a interface esteja estável e não solta, caso contrário a estabilidade da transmissão de dados pode ser afetada. Além disso, diferentes sistemas operacionais podem ter compatibilidades diferentes, portanto, durante o processo de depuração, a versão do sistema operacional deve ser totalmente considerada. Se você encontrar comunicação instável, além de verificar a taxa de transmissão, formato de comando, atraso e outros problemas comuns, você também pode tentar alterar a interface USB ou reiniciar o computador para eliminar alguns possíveis fatores de interferência e garantir um controle estável e preciso em vários ambientes.
Se você deseja obter ações coordenadas de 6 servos ao mesmo tempo, em vez de agir um por um, o segredo é usar a função "script". Você pode escrever um script cuidadosamente aqui, definir cuidadosamente a posição de destino e o tempo de movimento de cada canal e, em seguida, deixar o controlador executar o script de forma independente, sem depender mais do computador para enviar comandos em tempo real. Dessa forma, mesmo que o computador congele, o braço robótico ainda poderá concluir suavemente um conjunto de ações combinadas.
Se o controle em tempo real for realizado através do computador host, é necessário habilitar o "comando simultâneo multicanal" para empacotar e enviar os ângulos alvo de todos os canais de uma só vez para evitar a dessincronização causada por atrasos na rede.
Se o servo estiver preso, é provável que você esteja com fome. Cada servo pode consumir vários amperes de corrente quando bloqueado. Se 6 deles trabalharem juntos, a corrente instantânea pode facilmente ultrapassar 20A. Se você usar apenas uma fonte de alimentação USB, ela não só não será capaz de carregá-la, mas também poderá queimar a placa-mãe do computador. A abordagem correta é fornecer uma fonte de alimentação separada, conectar o cabo de alimentação do servo diretamente a uma bateria ou fonte de alimentação chaveada com energia suficiente e permitir que o sinal seja recebido apenas através de USB. Observe que o fio terra da fonte de alimentação e o fio terra do computador devem estar conectados ao mesmo terra, caso contrário o sinal flutuará aleatoriamente. Com a fonte de alimentação instalada, a maior parte das falhas e oscilações podem ser resolvidas.
Vendo isso, você percebe que o controle do volante não é tão misterioso assim? Na verdade, muitos problemas residem nos detalhes. Qual foi o problema de direção mais difícil que você já encontrou enquanto trabalhava em um projeto? Bem-vindo a compartilhar sua “história de sangue e lágrimas” na área de comentários e vamos evitar armadilhas juntos. Se você achar este artigo útil, não esqueça de curtir e encaminhá-lo para que mais amigos que jogam servos possam vê-lo!
Hora de atualização: 25/02/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.





















