


























ТЕХНИЧЕСКАЯ ПОДДЕРЖКА


Опубликовано 2026-02-16
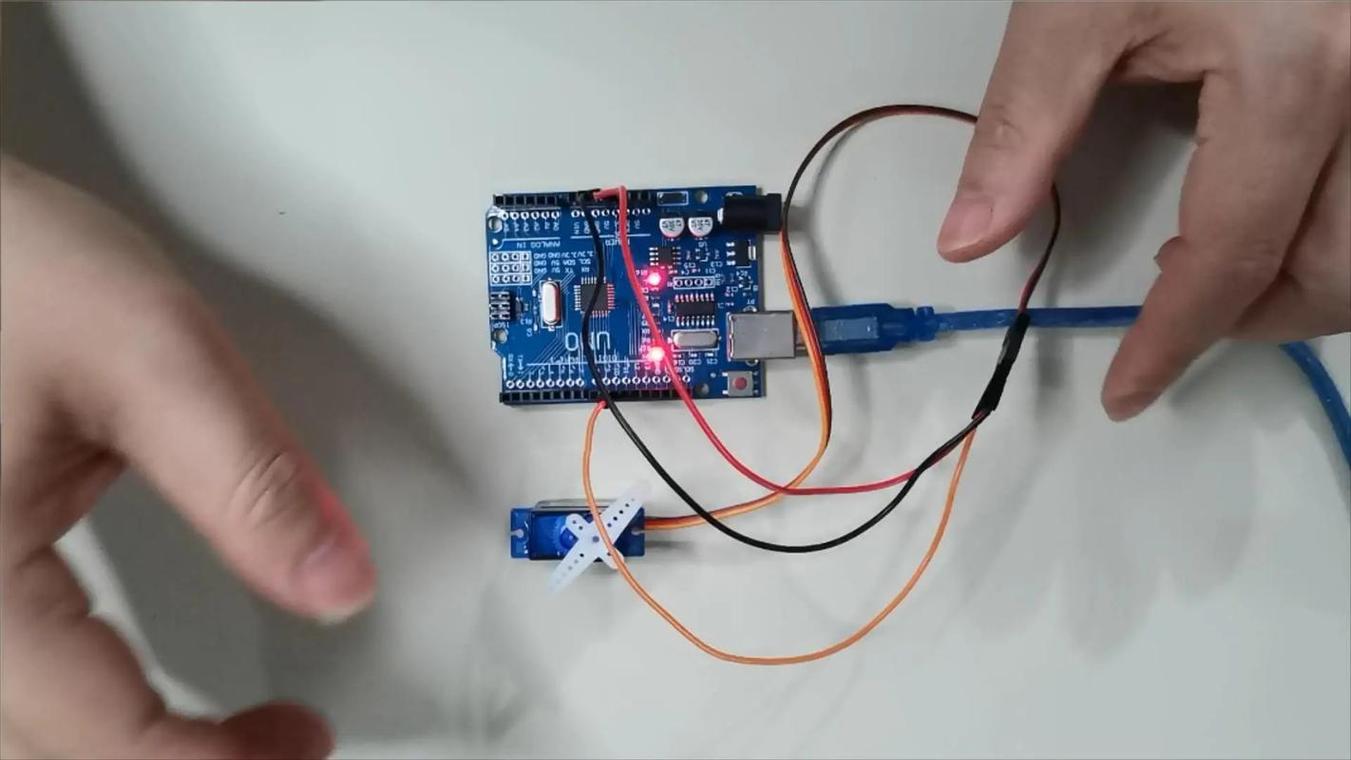
Я только что получилсервоприводи хотел подключить его к микроконтроллеру, но растерялся глядя на три провода? Не волнуйтесь, это проблема, с которой сталкивается почти каждый новичок, играющийсервоприводs столкнется. На самом деле подключение проще, чем вы думаете. Если вы понимаете, для чего нужны три провода, и шаг за шагом следуете инструкциям, вы можете быть уверены, что получитесервоприводпереезд в течение получаса.
Три провода, выходящие из сервопривода, обычно представляют собой провод питания, провод заземления и сигнальный провод. Провод питания обычно красного цвета и подключается к выводу 5 В микроконтроллера для питания сервопривода. Заземляющий провод коричневого или черного цвета подключается к выводу GND микроконтроллера, позволяя схеме сформировать петлю. Сигнальная линия обычно оранжевого или желтого цвета, которая подключена к выходному выводу ШИМ микроконтроллера и используется для управления углом поворота сервопривода. Понимание функций, соответствующих цветам, — это хороший первый шаг.
Если вы подключили по цвету, но сервопривод не двигается, самая распространенная причина – недостаточное питание. Ток на выводе 5 В самого микроконтроллера ограничен, и он не может управлять большим пожирателем сервопривода. В этом случае сервопривод может слегка вибрировать, но не поворачиваться, или вообще не реагировать. Попробуйте подключить к сервоприводу отдельный внешний источник питания, например аккумулятор или модуль стабилизации напряжения, и соедините заземляющий провод источника питания с заземляющим проводом микроконтроллера. Сигнальная линия остается неизменной, и проблему обычно можно решить.
Выбор источника питания зависит от того, какой сервопривод вы используете. Если это обычный сервопривод с небольшим крутящим моментом, рабочий ток составляет несколько сотен миллиампер, и его можно управлять, модифицировав его с помощью нескольких сухих батарей или блока питания мобильного телефона. Если это высокомоментный металлический сервопривод, рабочий ток может достигать нескольких ампер, поэтому вам придется рассмотреть возможность использования аккумулятора специальной модели самолета или мощного модуля стабилизации напряжения. Главное — обратить внимание на номинальное рабочее напряжение и ток запертого ротора сервопривода. По этому параметру добавьте запас в 20%, чтобы его было практично использовать.
После того, как проводка завершена, пришло время написать код. Вам необходимо вывести волну ШИМ на вывод, где расположена сигнальная линия микроконтроллера, которая является управляющим сигналом, необходимым для моделирования сервопривода. Обычно рулевому механизму требуется частота 50 Гц, что означает цикл длительностью 20 миллисекунд. В этом цикле время высокого уровня составляет от 0,5 до 2,5 миллисекунд, что соответствует повороту сервопривода от 0 до 180 градусов. В библиотечных функциях многих микроконтроллеров есть готовые библиотеки Servo. Вы можете напрямую определить угол письма, не вычисляя это сложное время самостоятельно.
Если вы хотите, чтобы робот двигался, одного сервопривода явно недостаточно. При подключении нескольких сервоприводов большой проблемой становится источник питания. В это время не думайте об использовании источника питания микроконтроллера. Вы должны использовать внешний источник питания, и источник питания должен быть достаточно большим. Соедините красные провода всех сервоприводов вместе с положительным полюсом источника питания, а черные провода вместе, чтобы соединить отрицательный полюс источника питания и общую землю микроконтроллера. Сигнальные линии соответственно подключены к различным выводам ШИМ микроконтроллера. Таким образом, каждым сервоприводом можно управлять в программе независимо и позволить им работать вместе.
Иногда угол написан, но положение сервопривода всегда отклоняется. Это может быть связано с помехами в сигнальной линии, особенно если проводка относительно длинная. Попробуйте скрутить вместе сигнальный провод и провод заземления, что может оказать определенный эффект защиты от помех. Кроме того, потенциометр внутри сервопривода также имеет физические ошибки. Вы можете немного подкорректировать диапазон ширины импульса в коде и подстроить его, чтобы сделать угол более точным. Если после длительного использования результаты не точны, возможно, сам сервопривод изношен и его необходимо заменить.
Причиной возгорания чего-либо обычно является слишком большой ток или неправильное подключение. Обязательно дважды проверьте напряжение источника питания перед подключением. Никогда не подключайте высоковольтный источник питания непосредственно к сервоприводу. Отрицательный полюс внешнего источника питания, подающего питание на сервопривод, должен быть подключен к GND микроконтроллера, чтобы образовался единый опорный уровень. При отладке программы вы можете сначала разместить сервопривод под средним углом перед включением, чтобы предотвратить внезапное переворачивание сервопривода вниз и возникновение чрезмерного тока в момент включения. Если вы чувствуете, что сервопривод горячий или издает ненормальный шум, немедленно отключите питание и проверьте.
Я надеюсь, что эта информация поможет вам успешно сделать первый шаг в управлении сервоприводом рулевого управления. Подумайте, какая конкретная проблема беспокоит вас больше всего при подключении или программировании? Добро пожаловать, чтобы поговорить о своем опыте в области комментариев. Если вы найдете это полезным, не забудьте поставить лайк и поделиться им с друзьями, которым это нужно.
Время обновления: 16 февраля 2026 г.
Свяжитесь со специалистом по продукции Kpower, чтобы порекомендовать подходящий двигатель или редуктор для вашего продукта.





















