


























APOYO TÉCNICO


Publicado 2026-03-12
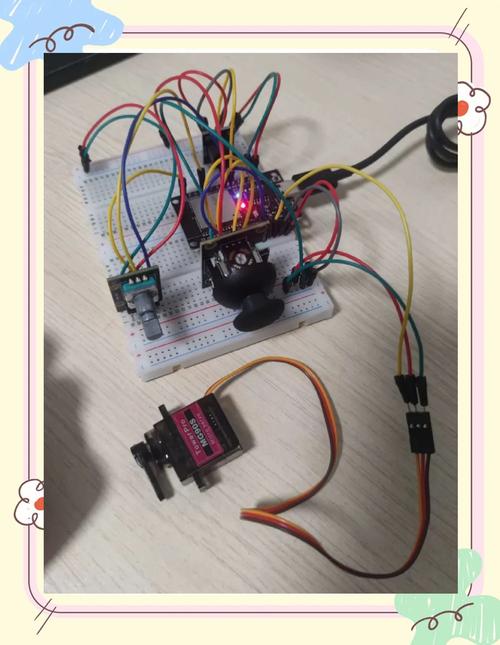
He estado trabajando en el control del mecanismo de dirección durante un tiempo y he pasado por más obstáculos de los que he comido. Al principio pensé que giraría cuando lo conectara a una señal PWM, pero el resultado fue que vibró como el Parkinson o no podía girar en el ángulo que quería. Más tarde, me calmé e hice varias rondas de experimentos y luego encontré algunas pistas. Hoy compartiré contigo algunas ideas prácticas para ayudarte a evitar desvíos.
Cuando entra en contacto por primera vez conservos, definitivamente te confundirán esos términos. No te preocupes, desarmémoslo y echemos un vistazo. El mecanismo de dirección es esencialmente un "pequeño sistema de circuito cerrado" que integra un motor de CC, un engranaje reductor y un panel de control. Le da una señal de pulso y detecta el ángulo actual a través del potenciómetro interno y lo compara con su posición objetivo memorizada. Si no es correcto girará hasta quedar alineado.
Lo que hice en ese momento fue muy estúpido pero muy efectivo: tomé un 9g baratoservoLo desarmé y lo miré. Al ver el potenciómetro girar con el eje de salida con mis propios ojos, comprendí instantáneamente cuál era la retroalimentación. Luego utilicé un osciloscopio para observar la señal de control y descubrí que el tiempo de alto nivel era de 0,5 ms a 2,5 ms, correspondiente a 0 grados a 180 grados. La lógica quedó clara de inmediato.
El programa parece simple, solo envía un PWM, pero no es fácil lograr estabilidad. Al principio, utilicé un retraso de software para simular PWM. Como resultado, el servo giró uno tras otro. Debido a que el microcontrolador tenía que realizar otro trabajo, se interrumpió el retraso. Más tarde, fue reemplazado por una interrupción del temporizador, y se reservó especialmente un temporizador de hardware para generar ondas PWM, y el servo inmediatamente se volvió fluido.
Hay otro detalle que quizás pases por alto: el estado del puerto GPIO en el momento del encendido. Si la salida del pin del microcontrolador es incierta cuando se inicia, el servo se sacudirá violentamente, lo que puede causar al menos una descarga eléctrica o, en el peor de los casos, dañar la estructura mecánica. Mi solución es: primero bajar todos los pines relacionados con los servos al encenderlos y luego llevarlos lentamente al ángulo objetivo una vez completada la inicialización. Este truco es particularmente efectivo.
Hablando de inquietud, aquí hay muchos trucos. El problema más común es el suministro de energía. La corriente cuando se inicia el servo puede elevarse a 1A o incluso más. Si la fuente de alimentación no puede soportarlo y el voltaje cae, será necesario reiniciar el microcontrolador en el tablero de control. Utilicé un banco de energía de teléfono móvil para alimentar un solo servo y fue muy estable.
Otra cosa que fácilmente se pasa por alto es la interferencia en la línea de señal. Especialmente cuando el cable del servo es relativamente largo, la señal PWM actúa como una antena y es propensa a generar ruido de acoplamiento. La solución también es simple: use un par trenzado para la línea de señal o conéctelo directamente a tierra con una resistencia de 1k, lo que puede suprimir eficazmente la fluctuación. Además, si su frecuencia PWM está demasiado lejos de los 50 Hz (período de 20 ms) requeridos por el servo, también provocará un control inexacto.
Hay todo tipo de servos en el mercado, y si eliges el proyecto equivocado, tu trabajo será en vano. Primero observe el torque, que está directamente relacionado con si puede impulsar su carga. Normalmente calculo el par requerido para la carga y dejo un margen del 30%. Por ejemplo, si quieres hacer un brazo robótico, la articulación más distal requiere el torque más pequeño, por lo que la base debe ser varias veces más grande.
Luego mire la velocidad, usando el indicador de seg/60°. Por ejemplo, 0,12 segundos/60° es más rápido que 0,18. Pero tenga en cuenta que el par y la velocidad suelen ser contradictorios, y aquellos con mayor par suelen ser más lentos. Lo último es el voltaje y el tamaño de funcionamiento. Debe comprobar si su placa se lo puede permitir y si se pueden instalar las piezas estructurales. La durabilidad de los engranajes metálicos y el bajo costo de los engranajes de plástico dependen de su presupuesto y escenarios de aplicación.
Si quieres hacer un robot, deberás controlar varios servos al mismo tiempo. Sólo hay una docena de puertos IO en un bloque. El control directo es teóricamente posible, pero en la práctica no se puede realizar y, al mismo tiempo, la corriente de arranque es demasiado alta. Mi enfoque es utilizar una placa de servocontrol, como esta placa de interfaz I2C, que puede gestionar 16 canales. El control principal solo envía comandos y todo el PWM lo genera.
También debes prestar atención al software. Nunca dejes que todos los servos salten de 0 grados a 180 grados al mismo tiempo. La corriente puede cortar el suministro de energía. Hice un "inicio escalonado" en el código, moviendo solo un paso del servo cada 20 ms, o usando un método de inicio lento para permitirles "subir" lentamente a la posición objetivo, de modo que la corriente sea mucho más suave.
La peor lección que aprendí fue que la fuente de alimentación estaba conectada al revés. Sólo cuando hubo humo me di cuenta de que los servos normales no tienen protección de conexión inversa. Más tarde aprendí a colocar diodos en el cable de alimentación o a trabajar en el enchufe. El diseño infalible es muy importante. También hay un límite mecánico. El ángulo debe estar limitado en el programa, de lo contrario el servo golpeará la pared y el engranaje pronto colapsará.
Además, al depurar, no se limite a mirar el código, preste más atención al ensamblaje mecánico. Una vez, el servo temblaba todo el tiempo y después de luchar con el programa durante tres días, finalmente descubrí que el tornillo de la biela estaba flojo y que el espacio era demasiado grande. Desde entonces, he desarrollado un hábito: primero verificar la maquinaria, luego verificar el circuito y finalmente mover el código. Esta secuencia me ha ahorrado mucho tiempo.
¿Cuál es el problema más extraño que has encontrado con el servocontrol? Charlemos en el área de comentarios y estudiemos juntos. Si lo encuentras útil, dale me gusta y compártelo con más amigos, ¡para que todos puedan trabajar en el proyecto sin problemas!
Hora de actualización: 2026-03-12
Comuníquese con el especialista en productos de Kpower para recomendarle un motor o caja de cambios adecuado para su producto.






















