外壳(Case)
1. 舵机的外壳有上壳、中壳、底壳三个部分。舵机的外壳一般是塑料的,特殊的舵机可能会有金属铝合金外壳。
2. 金属外壳能够提供更好的散热,可以让舵机内的电机运行在更高功率下,以提供更高的扭矩输出。金属外壳也可以提供更牢固的固定位置。
常用的塑胶外壳的材料是POM或尼龙加纤。也有一些例外,比如9克舵机蓝色外壳是PC,黑色外壳是ABS+PC。常用的金属外壳材料是铝。
| 产品参数 |
定义 |
值 |
| 测试1 |
222 |
222 |
| 扭矩 |
11 |
22 |
-
不同壳体的优缺点
塑料外壳有质量轻、成本低的优点,因此大部分舵机使用的都是塑料的外壳。但是塑料外壳也有散热差、强度低、保护效果不好的缺点。
和塑料外壳相比,金属外壳有更好的散热效果和强度。但是金属壳体由于材料成本高、加工工艺复杂(大多是CNC),只能使用在高端舵机上。后来为了平衡舵机的性能和价格,出现了只有中壳采用金属壳的半铝舵机。
减速齿轮组(Gearbox / Reducer)
输出轴(Output shaft)
-
常见的齿轮种类
-
金属齿(Metal gear)
金属齿常用的材料有:铜、铝、钢、钛合金。最常用的材料是铜。
-
塑胶齿(Plastic gear)
塑胶齿常用的材料有:POM、PE、TPEE;
电位器(Position sensor / Potentiometer)
-
常见的电位器种类
圆形电位器、方形电位器、磁编码位置传感器。
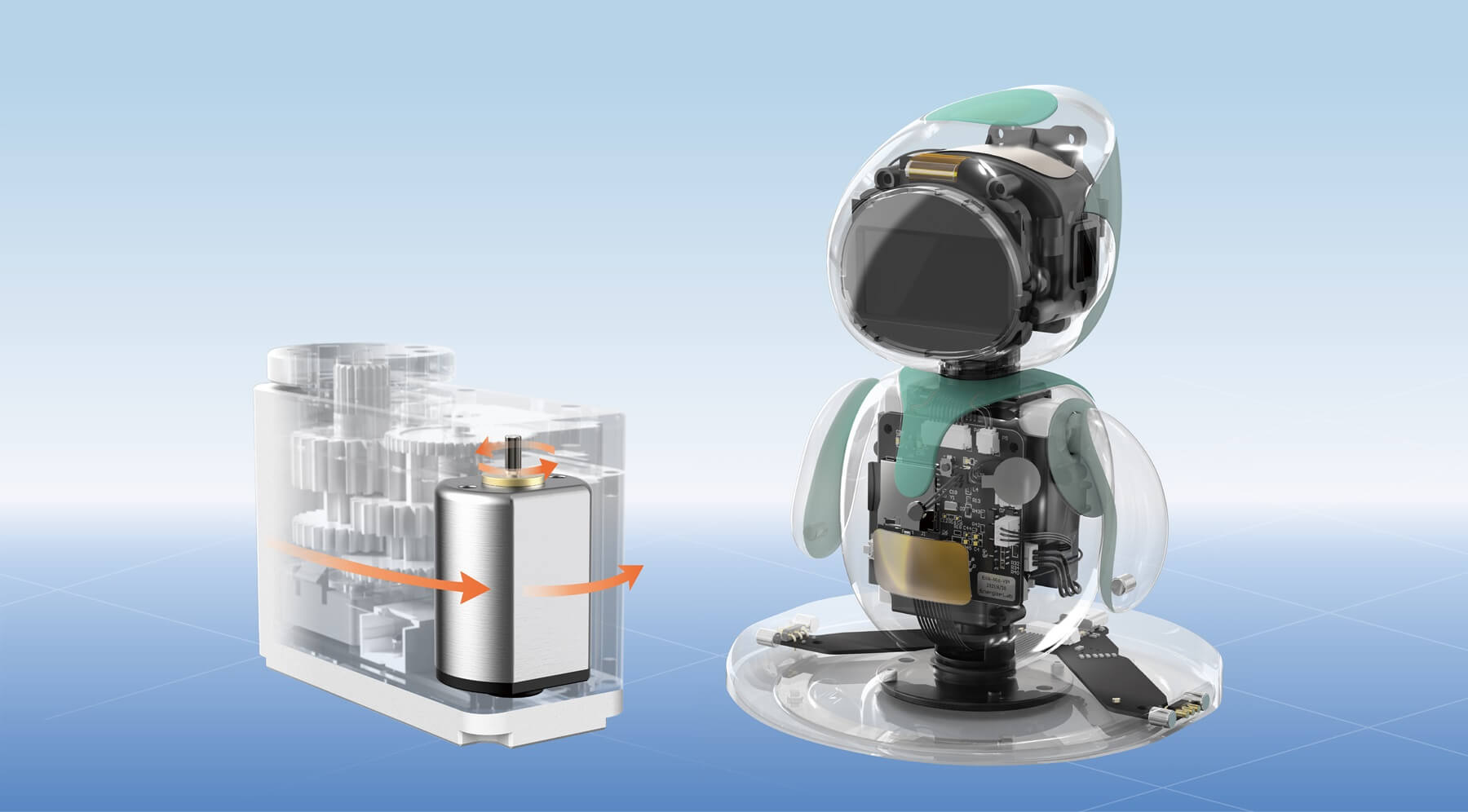
电机/马达(Motor)
电机在舵机中作用是给舵机提供转动的力,当电机转动时,通过马达齿带动一级齿转动,逐级传递,最终带动输出齿转动。
舵机内部使用的电机有:直流有刷铁芯电机、直流有刷空心杯电机、直流无刷电机。三种电机的对比如下:
-
直流有刷铁芯电机:
- 优点:成本低。大部分舵机使用的都是有刷铁芯电机。
- 缺点:寿命短、响应速度慢、效率低等;
-
直流有刷空心杯电机
空心杯电机也称无铁芯电机。相同尺寸下,它能够实现比有刷电机更大的扭矩,寿命也更长,但是伴随着发热的问题,因此空心杯电机大多配合铝壳使用。
- 优点:效率高、响应快、寿命长、能量密度大等;
- 缺点:发热严重;
-
直流无刷电机
使用有刷电机的舵机寿命主要受到电机的限制,转动过程中电刷一直在和换向器摩擦,由于电刷的损耗,电机的寿命会急剧减少。无刷电机没有了电刷结构,寿命往往是有刷电机的好几倍。
- 优点:效率高、寿命长、噪音低;
- 缺点:价格贵。因此大扭力小体积的高端舵机才会使用无刷电机。
控制电路(Motor control board)
-
硬件(PCB)
-
固件(Firmware)