


























TECHNISCHE UNTERSTÜTZUNG


Veröffentlicht 2026-03-16
Wenn Sie das debuggenServoTreten bei Ihnen häufig Zittern, eine langsame Reaktion oder Probleme beim Drehen auf, egal wie Sie das Gerät drehen? Nachdem ich lange gekämpft hatte, stellte ich schließlich fest, dass die Grundursache des Problems oft in der „Servo„Treiber“ klingt etwas abstrakt. Was genau ist das eigentlich und warum ist es so wichtig?
Einfach ausgedrückt ist der Servotreiber die Brücke, die Ihr Gehirn (Hauptsteuerchip, z. B. STM32) und den Servokörper verbindet, oder mit anderen Worten, er ist ein gewissenhafter „Übersetzer“. Ihr Hauptsteuerchip versteht nur die digitalen Signale 0 und 1, aber das Servo benötigt einen elektrischen Impuls einer bestimmten Breite, um sich in einen bestimmten Winkel zu drehen.
Die Aufgabe dieses Treibers besteht darin, die Anweisung, um wie viele Grad er sich drehen soll, genau in ein PWM-Signal (Pulsweitenmodulation) umzuwandeln, das der Servo verstehen kann. Es ist dafür verantwortlich, die richtige Impulsbreite zum richtigen Zeitpunkt auszugeben. Ohne dieses Programm sind die Anweisungen, die Sie dem Servo geben, so, als würden Sie einer Kuh Klavier spielen. Es weiß überhaupt nicht, was es tun soll, und bleibt entweder stehen oder dreht sich willkürlich um.
Die Wirkung ist riesig. Man kann sagen, dass die Qualität des Treibers direkt darüber entscheidet, ob die Leistung des Servos in Ihrem Projekt ein „Tausend-Meilen-Pferd“ oder ein „störrischer Esel“ ist. Ein gut geschriebener Treiber kann dafür sorgen, dass das Servo schnell reagiert, sich sanft dreht und überall dort anschlägt, wo Sie es hinrichten, und es ist sehr energiesparend.
Im Gegenteil, ein schlechter Fahrer kann dazu führen, dass das Servo stark vibriert und nach Erreichen der Zielposition immer noch „zittert“. Oder es reagiert möglicherweise langsam und es dauert lange, bis es sich nach dem Senden des Befehls zu bewegen beginnt. In schweren Fällen kann es zu einer starken Erwärmung des Servos und sogar zum Durchbrennen des internen Motors kommen. Bei der Arbeit an Projekten, die die koordinierte Arbeit mehrerer Servos erfordern, wie etwa eines Roboterhundes oder eines sechsachsigen Roboterarms, werden kleine Fehler im Treiber vergrößert, was zu Fehlfunktionen des gesamten Systems führt.
Bei der Auswahl eines Treibers gilt nicht, dass teurer gleich besser ist und auch nicht, dass mehr Code besser ist. Der Schlüssel hängt von Ihrem „Geldbeutel“ und Ihren spezifischen Bedürfnissen ab. Sie müssen zunächst herausfinden, ob es sich bei Ihrem Servo um ein Analogservo oder ein Digitalservo handelt. Sie haben leicht unterschiedliche Anforderungen an Antriebssignale. Im Allgemeinen reagieren digitale Servos breiter auf Antriebsfrequenzen.
Sie müssen sich die Steuerschnittstelle ansehen. Am häufigsten wird die PWM-Welle zur Steuerung verwendet. Diese Art der Fahrlogik ist die einfachste und Sie können sie selbst schreiben. Wenn Sie aber besonders viele Servos haben, beispielsweise mehr als ein Dutzend, dann sollten Sie über serielle Bus-Servos nachdenken. Die verwendeten Treiber und Kommunikationsprotokolle stimmen überein. Zu diesem Zeitpunkt ist es sehr wichtig, eine ausgereifte Treiberbibliothek auszuwählen, die Ihnen dabei helfen kann, viel Zeit beim Debuggen zu sparen. Sie können auf den offiziellen Websites einiger Kpower- oder Servohersteller nachsehen, ob diese vorgefertigte Treiberbibliotheken oder Anwendungshinweise anbieten.
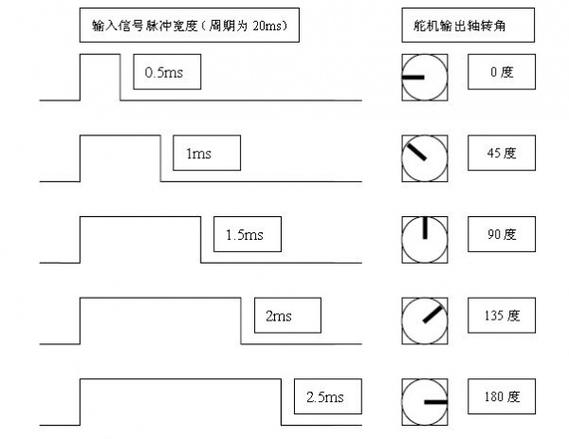
Wenn Sie selbst eines schreiben möchten, ist es eigentlich nicht so mysteriös. Normalerweise sind es nur ein paar Codeteile mit klarer Logik. Am Beispiel des am häufigsten verwendeten PWM-Servos besteht der Kern darin, dass Sie das Steuerprinzip des Servos verstehen müssen: Im Allgemeinen beträgt die Periode eines Impulssignals 20 ms und die Hochpegelzeit liegt zwischen 0,5 ms und 2,5 ms, was 0 Grad bis 180 Grad des Servos entspricht.
Wenn Sie ein Programm schreiben, müssen Sie zunächst einen Timer initialisieren und ihn eine PWM-Welle mit einer Periode von 20 ms erzeugen lassen. Anschließend müssen Sie eine Winkelzuordnungsfunktion schreiben, z. B. den Winkelwert von 0 bis 180 in einen Impulsbreitenwert von 0,5 bis 2,5 Millisekunden umwandeln und ihn dann im PWM-Register festlegen. Wie dieservo.write()Funktion in der Plattform, dies geschieht hinter den Kulissen. Wenn Sie es aufschreiben, erhalten Sie ein viel tieferes Verständnis für die Funktionsweise des Lenkgetriebes und können künftig auftretende Probleme leichter beheben.
Die größte Angst beim Spielen mit Lenkgetrieben besteht darin, auf unerklärliche Probleme zu stoßen. Wenn beispielsweise das Servo vibriert, handelt es sich in der Regel nicht um einen Fehler in der Programmlogik, sondern um ein physikalisches Problem. Der häufigste Grund ist eine unzureichende Stromversorgung! Der Strom beim Starten des Servos ist sehr groß. Wenn die Stromversorgung nicht mithalten kann, wird die Hauptsteuerplatine zurückgesetzt oder das Servo zuckt. Die Lösung besteht darin, einen großen Kondensator parallel zur Stromversorgung zu schalten.
Ein weiteres Beispiel ist, dass sich das Servo nicht in den angegebenen Winkel drehen kann oder dieser nach dem Drehen nicht beibehalten werden kann. Dies kann daran liegen, dass der Berechnungsbereich Ihrer PWM-Impulsbreite nicht richtig eingestellt ist oder das Servo nicht genügend Drehmoment hat und festsitzt. Es ist auch möglich, dass die Befehle zur Steuerung des Servos in Ihrem Programm zu häufig ausgegeben werden, wodurch die Reaktionsgeschwindigkeit des Servos selbst überschritten wird und dieser nicht mehr reagiert. Zu diesem Zeitpunkt kann das Problem normalerweise gelöst werden, indem die Häufigkeit des Sendens von Steueranweisungen leicht verringert oder eine kleine Verzögerung zwischen den beiden Anweisungen hinzugefügt wird.
Wenn Sie eine höhere Steuerungsgenauigkeit anstreben, z. B. die Verwendung eines Servos zur Herstellung eines hochpräzisen Kardanrings, reicht der Basistreiber nicht aus. Sie können die Einführung einiger Optimierungsalgorithmen in Betracht ziehen. Wenn Sie beispielsweise „S-Kurven-Beschleunigung und -Verzögerung“ verwenden, um den Start und Stopp des Servos zu steuern, anstatt ihn sofort starten und stoppen zu lassen, kann der Jitter im Start- und Stoppmoment erheblich reduziert werden.
Um noch einen Schritt weiter zu gehen, können Sie dem Treiber einen PID-Regelalgorithmus (Proportional Integral Derivative) hinzufügen. Dazu muss Ihr Servo Winkelrückmeldung unterstützen (normalerweise das Befehlsservo). Der Fahrer liest den aktuellen Winkel in Echtzeit ab, vergleicht ihn mit dem Zielwinkel und berechnet dann mithilfe des PID-Algorithmus den Steuerbetrag, der im nächsten Moment ausgegeben werden soll, damit sich das Servo schnell und gleichmäßig dem Zielwinkel annähern kann. Obwohl diese Optimierung den Code etwas komplizierter macht, ist die Leistungsverbesserung sofort spürbar.
Was ist das lästigste und ärgerlichste Problem, auf das Sie beim Debuggen des Servos in einem Projekt stoßen? Liegt es an einer unzureichenden Stromversorgung oder an einem Fehler in der Programmlogik? Hinterlassen Sie gerne eine Nachricht im Kommentarbereich, um Ihre Erfahrungen zu teilen, und wir können das Problem gemeinsam besprechen und lösen! Wenn Sie den Artikel nützlich finden, vergessen Sie nicht, ihm ein „Gefällt mir“ zu geben und ihn mit Ihren Freunden zu teilen, die ebenfalls mit Servos spielen.
Aktualisierungszeit: 16.03.2026
Wenden Sie sich an den Produktspezialisten von Kpower, um einen geeigneten Motor oder ein geeignetes Getriebe für Ihr Produkt zu empfehlen.






















