


























SUPORTE TÉCNICO


Publicado 2026-02-28
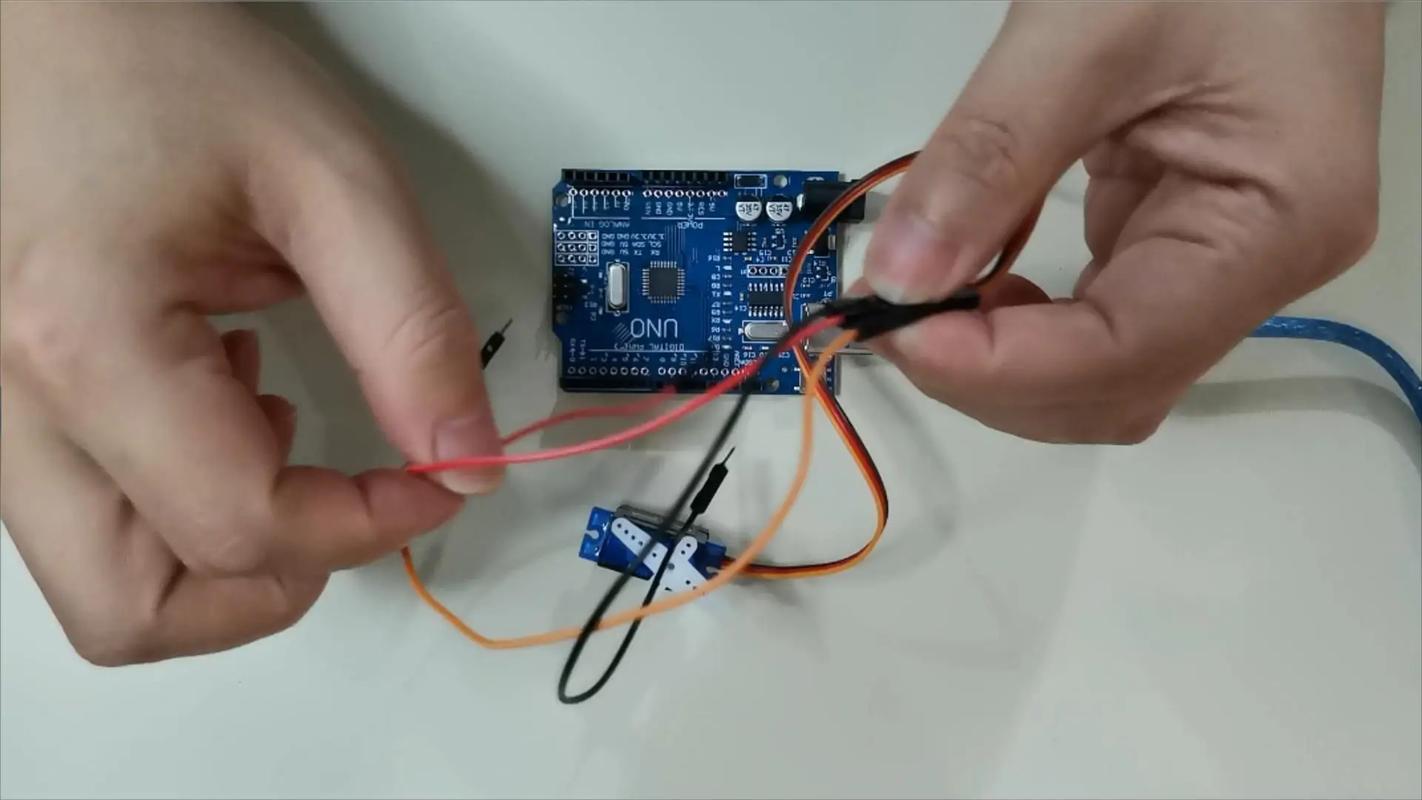
A maior dor de cabeça ao brincar comservos é o problema de fiação, especialmente para alto torqueservoé assim. Se a fiação estiver conectada incorretamente, ela pode não girar ou pode queimar diretamente. Muitos novatos entendem isso pela primeira vez e muitas vezes ficam confusos ao olhar para os três fios e não sabem como começar. Hoje explicaremos detalhadamente esse assunto para que você possa começar logo após lê-lo.
As cores dos três fios que saem do servo são geralmente relativamente fixas. O fio vermelho do meio, não precisa pensar nisso, deve ser o terminal positivo da fonte de alimentação, responsável por fornecer energia ao servo. O fio marrom ou preto é o pólo negativo, também chamado de fio terra, e precisa ser conectado ao pólo negativo da fonte de alimentação. A linha laranja, amarela ou branca restante é a linha de sinal, responsável por receber instruções da placa de controle e informar ao servo em que ângulo girar. Lembre-se dessas três cores e a fiação é metade da batalha.
Muitos amigos não conseguem diferenciar os pólos positivo e negativo. Na verdade, existe uma maneira simples de distingui-los. Se você observar atentamente o conector do cabo do servo, geralmente há um pequeno chanfro ou protuberância nele. Este design infalível evita que você o conecte ao contrário. Se você realmente não sabe, lembre-se de que o fio vermelho da maioria dos servos está no meio, com fios de sinal e terra em ambos os lados. Esta regra é muito geral.
Essa coisa é um tigre elétrico. Ao trabalhar, a corrente pode chegar a 1A ou até mais. Quando o rotor está bloqueado, a corrente é ainda mais assustadora. Você não deve esperar obter energia diretamente do pino de 5 V do Raspberry Pi ou Raspberry Pi, pois isso provavelmente queimará sua placa-mãe. Você deve preparar uma fonte de alimentação separada para isso, como uma bateria de 7,2 V ou um módulo estabilizador de tensão de alta corrente que pode produzir de 5 a 6 V.
Preste atenção especial ao fazer a fiação. O pólo negativo da fonte de alimentação do servo deve ser conectado ao GND do cartão de controle. Isso é chamado de terreno comum. Se não estiver conectado, o sinal ficará confuso e o servo irá tremer ou não obedecerá ao comando. Você pode conectar o terminal negativo da fonte de alimentação ao GND da placa de controle com um fio Dupont, para que a transmissão do sinal seja estável.
A linha de sinal deve ser conectada ao pino da placa de controle que suporta saída PWM. Para UNO, são os pinos digitais marcados com o símbolo “~”. Se for um Raspberry Pi, embora não possua PWM de hardware, pode ser simulado através de software ou usar uma placa servo driver especializada para emitir sinais, e o efeito será muito melhor.
O método de conexão é muito simples, assim como inserir blocos de construção. Mas tenha cuidado, nunca conecte a linha de sinal na fonte de alimentação ou no GND. Se você estiver usando uma placa servo driver, será mais fácil. Basta conectar o servo diretamente no canal da placa do driver e, em seguida, conectar a placa do driver e a placa de controle. A placa do driver também pode ajudar a resolver o problema da fonte de alimentação.
O erro mais comum é energia insuficiente. Você escreve o programa com grandes expectativas, mas o servo apenas balança levemente e então para de se mover. Nove em cada dez vezes, a fonte de alimentação não está acompanhando. Além disso, a linha de sinal é conectada a um pino digital comum em vez de um pino PWM. Desta forma, o servo permanecerá apenas em uma posição e não poderá controlar o ângulo com precisão.
Além disso, certifique-se de desligar a energia antes de fazer a fiação. Se você acidentalmente causar um curto-circuito durante a operação ativa, faíscas voarão e a placa de circuito de controle do servo será descartada em um instante. Desenvolva o hábito de verificar a fiação após conectá-la para ter certeza de que não há problemas antes de ligar a energia. Isso pode economizar muito dinheiro desperdiçado.
Após conectar os fios, teste com um programa simples. Por exemplo, deixe o servo girar lentamente de 0 a 180 graus e depois voltar novamente. Se o servo puder se mover suavemente sem tremores ou ruídos anormais, parabéns, a fiação foi bem-sucedida. Se não funcionar, desligue rapidamente a energia e verifique se o aterramento comum não está feito corretamente ou se a tensão da fonte de alimentação não é suficiente.
️ Uma pequena dica: Quando a energia estiver desligada, gire suavemente o disco de saída do servo com a mão. Não deve girar porque a engrenagem de redução está presa. Se ele girar facilmente, a engrenagem interna do servo poderá ser danificada. Após ser ligado, o servo deverá ser capaz de parar de forma constante na posição designada. Você deve sentir muita resistência ao retirá-lo com as mãos. Isso é considerado normal.
O torque é grande e a engrenagem metálica é durável. É especialmente adequado para uso em articulações de robôs, como na fabricação de um robô de seis pernas ou de um braço robótico. Também é perfeitamente suficiente usá-lo para fornecer força de direção para modelos de carros e barcos com controle remoto. Você pode até fazer um gimbal DIY e fixar a câmera no servo para realizar o rastreamento automático do rosto.
Na verdade, a jogabilidade do servo é muito mais do que apenas virar. Ao combinar vários sensores, como ultrassônico e infravermelho, ele pode detectar o ambiente e responder. Você pode usá-lo para fazer uma lata de lixo que abre e fecha automaticamente ou um suporte para painel solar que gira de acordo com o ângulo da luz. Desde que a base da fiação esteja estabelecida, o resto depende inteiramente da sua imaginação.
Vendo isso, você deve ter uma ideia sobre a fiação. Quando você conectou o servo pela primeira vez, você teve algum problema devido à sequência errada de fiação ou fonte de alimentação insuficiente? Bem-vindo a compartilhar sua experiência na área de comentários. Vamos nos comunicar e evitar armadilhas juntos. Se você achar útil, não esqueça de curtir e compartilhar com mais amigos!
Hora de atualização: 28/02/2026
Entre em contato com o especialista de produtos da Kpower para recomendar um motor ou caixa de engrenagens adequado para o seu produto.





















