


























APOYO TÉCNICO


Publicado 2026-03-16
Cuando estás depurando elservo, ¿se encuentra a menudo con inquietudes, respuesta lenta o falla al girar en su lugar sin importar cómo lo gire? Después de luchar durante mucho tiempo, finalmente descubrí que la causa raíz del problema a menudo radica en "servodriver" eso suena un poco abstracto. ¿Qué es exactamente esto y por qué es tan importante?
En pocas palabras, el servocontrolador es el puente que conecta su cerebro (chip de control principal, como STM32) y el cuerpo del servo, o en otras palabras, es un "traductor" concienzudo. Su chip de control principal solo entiende las señales digitales de 0 y 1, pero el servo necesita un pulso eléctrico de un ancho específico para girar a un ángulo específico.
La tarea de este controlador es traducir con precisión la instrucción de cuántos grados desea que se convierta en una señal PWM (modulación de ancho de pulso) que el servo pueda entender. Es responsable de emitir el ancho de pulso correcto en el momento correcto. Sin este programa, las instrucciones que le das al servo son como tocarle el piano a una vaca. No sabe qué hacer en absoluto y se quedará quieto o girará al azar.
El impacto es enorme. Se puede decir que la calidad del conductor determina directamente si el desempeño del servo en su proyecto es un "caballo de mil millas" o un "burro testarudo". Un controlador bien escrito puede hacer que el servo responda rápidamente, gire suavemente y golpee dondequiera que lo apunte, y ahorra mucho energía.
Por el contrario, un controlador de mala calidad puede hacer que el servo vibre significativamente y aún "temblar" después de alcanzar la posición objetivo; o puede responder lentamente y pasará mucho tiempo antes de que comience a moverse después de enviar el comando; En casos severos, puede causar que el servo se caliente severamente e incluso queme el motor interno. Cuando se trabaja en proyectos que requieren el trabajo coordinado de múltiples servos, como un perro robot o un brazo robótico de seis ejes, los pequeños defectos en el controlador se magnificarán y provocarán un mal funcionamiento de todo el sistema.
A la hora de elegir un controlador, no se trata de que más caro sea mejor, ni que más código sea mejor. La clave depende de su “billetera” y de sus necesidades específicas. Primero debes determinar si el servo que tienes es un servo analógico o un servo digital. Tienen requisitos ligeramente diferentes para las señales de conducción. En términos generales, los servos digitales tienen una respuesta más amplia a las frecuencias de accionamiento.
Debes mirar la interfaz de control. El más utilizado es utilizar la onda PWM para el control. Este tipo de lógica de conducción es la más simple y puedes escribirla tú mismo. Pero si tiene una cantidad particularmente grande de servos, como más de una docena, entonces debería considerar los servos de bus serie. Los controladores y protocolos de comunicación que utilizan coinciden. En este momento, es muy importante elegir una biblioteca de controladores madura, que puede ayudarle a ahorrar mucho tiempo de depuración. Puede visitar los sitios web oficiales de algunos fabricantes de Kpower o servos para ver si ofrecen bibliotecas de controladores o notas de aplicación listas para usar.
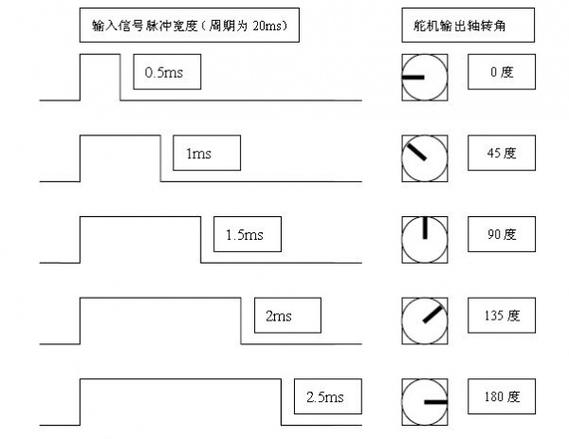
Si quieres escribir uno tú mismo, en realidad no es tan misterioso. Por lo general, son solo unos pocos fragmentos de código con una lógica clara. Tomando como ejemplo el servo PWM más utilizado, el núcleo es que es necesario comprender el principio de control del servo: en términos generales, el período es una señal de pulso de 20 ms y el tiempo de alto nivel está entre 0,5 ms y 2,5 ms, correspondiente a 0 grados a 180 grados del servo.
Al escribir un programa, primero debe inicializar un temporizador y dejar que genere una onda PWM con un período de 20 ms. Luego, debe escribir una función de mapeo de ángulo, como convertir el valor del ángulo de 0 a 180 en un valor de ancho de pulso de 0,5 a 2,5 milisegundos y luego configurarlo en el registro PWM. como elservo.escribir()funcionan en la plataforma, esto es lo que se hace detrás de escena. Al escribirlo, tendrá una comprensión mucho más profunda de cómo funciona el mecanismo de dirección y será más fácil solucionar los problemas que encuentre en el futuro.
El mayor temor al jugar con el mecanismo de dirección es encontrar problemas inexplicables. Por ejemplo, si el servo vibra, normalmente no se trata de un error de lógica del programa, sino de un problema físico. ¡La razón más común es el suministro de energía insuficiente! La corriente cuando se inicia el servo es muy grande. Si el suministro de energía no puede mantener el ritmo, hará que el tablero de control principal se reinicie o que el servo se contraiga. La solución es conectar un condensador grande en paralelo con la fuente de alimentación.
Otro ejemplo es que el servo no puede girar al ángulo especificado o no se puede mantener después de girar. Esto puede deberse a que el rango de cálculo de su ancho de pulso PWM no está configurado correctamente o que el servo tiene un torque insuficiente y está atascado. También es posible que los comandos para controlar el servo en su programa se emitan con demasiada frecuencia, excediendo la velocidad de respuesta del servo mismo, provocando que no responda. En este momento, el problema generalmente se puede resolver reduciendo ligeramente la frecuencia de envío de instrucciones de control o agregando un pequeño retraso entre las dos instrucciones.
Si busca una mayor precisión de control, como usar un servo para hacer un cardán de alta precisión, entonces el controlador básico no es suficiente. Puede considerar introducir algunos algoritmos de optimización. Por ejemplo, usar "aceleración y desaceleración en curva S" para controlar el inicio y la parada del servo, en lugar de dejar que arranque y se detenga instantáneamente, puede reducir en gran medida la fluctuación en el momento de inicio y parada.
Yendo un paso más allá, puede agregar un algoritmo de control de bucle cerrado PID (Proporcional Integral Derivado) al controlador. Esto requiere que su servo admita retroalimentación de ángulo (generalmente el servo de comando). El controlador leerá el ángulo actual en tiempo real, lo comparará con el ángulo objetivo y luego utilizará el algoritmo PID para calcular la cantidad de control que debe emitirse en el siguiente momento, de modo que el servo pueda converger rápida y constantemente al ángulo objetivo. Aunque esta optimización complica un poco el código, la mejora del rendimiento es inmediata.
¿Cuál es el problema más problemático y enloquecedor que encuentra al depurar el servo en un proyecto? ¿Es una fuente de alimentación insuficiente o un error en la lógica del programa? Bienvenido a dejar un mensaje en el área de comentarios para compartir su experiencia, ¡y podremos discutirla y resolverla juntos! Si el artículo te resulta útil, no olvides darle me gusta y compartirlo con tus amigos que también juegan con servos.
Hora de actualización: 2026-03-16
Comuníquese con el especialista en productos de Kpower para recomendarle un motor o caja de cambios adecuado para su producto.






















